 | –≠–ª–µ–∫—Ç—Ä–æ–Ω–Ω—ã–π –∫–æ–º–ø–æ–Ω–µ–Ω—Ç: AD9853 | –°–∫–∞—á–∞—Ç—å:  PDF PDF  ZIP ZIP |

REV. C
Information furnished by Analog Devices is believed to be accurate and
reliable. However, no responsibility is assumed by Analog Devices for its
use, nor for any infringements of patents or other rights of third parties
which may result from its use. No license is granted by implication or
otherwise under any patent or patent rights of Analog Devices.
a
AD9853
One Technology Way, P.O. Box 9106, Norwood, MA 02062-9106, U.S.A.
Tel: 781/329-4700
World Wide Web Site: http://www.analog.com
Fax: 781/326-8703
© Analog Devices, Inc., 1999
Programmable Digital
QPSK/16-QAM Modulator
FUNCTIONAL BLOCK DIAGRAM
10-BIT
DAC
SINE
COSINE
INTERPOLATION
FILTER
INV
SYNC
FILTER
DDS
PREAMBLE
INSERTION
RANDOMIZER
CLOCK
CONTROL FUNCTIONS
6
FIR
FILTER
FIR
FILTER
INTERPOLATION
FILTER
ENCODER:
FSK
QPSK
DQPSK
16-QAM
D16-QAM
DATA
DELAY
& MUX
XOR
R-S
FEC
AD9853
10
10
A
OUT
GAIN
CONTROL TO
DRIVER AMP
RESET
T
X
ENABLE
FEC
ENABLE/
DISABLE
REF CLOCK IN
SERIAL
DATA IN
SERIAL CONTROL BUS:
32-BIT OUTPUT FREQUENCY TUNING WORD
INPUT DATA RATE/MODULATION FORMAT
FEC/RANDOMIZER/PREAMBLE ENABLE/CONFIGURATION
FIR FILTER COEFFICIENTS
REF CLOCK MULTIPLIER ENABLE
I/Q PHASE INVERT
SLEEP MODE
TO LP FILTER
AND AD8320
CABLE DRIVER
AMPLIFER
FEATURES
Universal Low Cost Solution for HFC Network
Return-Channel T
X
Function: 5 MHz≠42 MHz/
5 MHz≠65 MHz
165 MHz Internal Reference Clock Capability
Includes Programmable Pulse-Shaping FIR Filters and
Programmable Interpolating Filters
FSK/QPSK/DQPSK/16-QAM/D16-QAM Modulation
Formats
6 Internal Reference Clock Multiplier
Integrated Reed-Solomon FEC Function
Programmable Randomizer/Preamble Function
Supports Interoperable Cable Modem Standards
Internal SINx/x Compensation
>50 dB SFDR @ 42 MHz Output Frequency (Single Tone)
Controlled Burst Mode Operation
+3.3 V to +5 V Single Supply Operation
Low Power: 750 mW @ Full Clock Speed (3.3 V Supply)
Space Saving Surface Mount Packaging
APPLICATIONS
HFC Data, Telephony and Video Modems
Wireless LAN
GENERAL DESCRIPTION
The AD9853 integrates a high speed direct-digital synthesizer
(DDS), a high performance, high speed digital-to-analog con-
verter (DAC), digital filters and other DSP functions onto a
single chip, to form a complete and flexible digital modulator
device. The AD9853 is intended to function as a modulator in
network applications such as interactive HFC, WLAN and
MMDS, where cost, size, power dissipation, functional integra-
tion and dynamic performance are critical attributes.
The AD9853 is fabricated on an advanced CMOS process and
it sets a new standard for CMOS digital modulator performance.
The device is loaded with programmable functionality and
provides a direct interface port to the AD8320, digitally-
programmable cable driver amplifier. The AD9853/AD8320
chipset forms a highly integrated, low power, small footprint
and cost-effective solution for the HFC return-path requirement
and other more general purpose modulator applications.
The AD9853 is available in a space saving surface mount pack-
age and is specified to operate over the extended industrial
temperature range of ≠40
∞
C to +85
∞
C.

≠2≠
REV. C
AD9853≠SPECIFICATIONS
Parameter
Temp
Test Level
Min
Typ
Max
Units
REF CLOCK INPUT CHARACTERISTICS
Frequency Range
6
◊
REFCLK Disabled (+3.3 V Supply)
Full
IV
42
126
MHz
6
◊
REFCLK Enabled (+3.3 V Supply)
Full
IV
7
21
MHz
6
◊
REFCLK Disabled (+5 V Supply)
Full
IV
108
168
MHz
6
◊
REFCLK Enabled (+5 V Supply)
Full
IV
18
28
MHz
Duty Cycle
+25
∞
C
IV
40
60
%
Input Capacitance
+25
∞
C
V
3
pF
Input Impedance
+25
∞
C
V
100
M
DAC OUTPUT CHARACTERISTICS
Resolution
10
Bits
Full-Scale Output Current
+25
∞
C
IV
5
10
20
mA
Gain Error
+25
∞
C
I
≠10
+10
% FS
Output Offset
+25
∞
C
I
10
µ
A
Output Offset Temperature Coefficient
Full
V
50
nA/
∞
C
Differential Nonlinearity
+25
∞
C
I
0.5
0.75
LSB
Integral Nonlinearity
+25
∞
C
I
0.5
1.5
LSB
Output Capacitance
+25
∞
C
V
5
pF
Phase Noise @ 1 kHz Offset, 40 MHz A
OUT
6
◊
REFCLK Enabled
+25
∞
C
V
≠100
dBc
6
◊
REFCLK Disabled
+25
∞
C
V
≠110
dBc
Voltage Compliance Range
+25
∞
C
I
≠0.5
+1.5
V
Wideband SFDR (Single Tone):
1 MHz A
OUT
+25
∞
C
IV
62
68
dBc
20 MHz A
OUT
+25
∞
C
IV
52
54
dBc
42 MHz A
OUT
+25
∞
C
IV
48
50
dBc
65 MHz A
OUT
1
+25
∞
C
IV
42
44
dBc
MODULATOR CHARACTERISTICS
I/Q Offset
+25
∞
C
IV
48
dB
Adjacent Channel Power
+25
∞
C
IV
44
dBm
Error Vector Magnitude
+25
∞
C
IV
1
2
%
In-Band Spurious Emission
5 MHz≠42 MHz A
OUT
+25
∞
C
IV
42
dBc
5 MHz≠65 MHz A
OUT
1
+25
∞
C
IV
40
dBc
Passband Amplitude Ripple
+25
∞
C
V
±
0.3
dB
TIMING CHARACTERISTICS
Serial Control Bus
Maximum Frequency
Full
IV
25
MHz
Minimum Clock Pulsewidth Low (t
PWL
)
Full
IV
10
ns
Minimum Clock Pulsewidth High (t
PWH
)
Full
IV
10
ns
Maximum Clock Rise/Fall Time
Full
IV
100
ns
Minimum Data Setup Time (t
DS
)
Full
IV
10
ns
Minimum Data Hold Time (t
DH
)
Full
IV
10
ns
Minimum Clock Setup--Stop Condition (t
CS
)
Full
IV
10
ns
Minimum Clock Hold--Start Condition (t
CH
)
Full
IV
10
ns
RESET
Minimum T
X
ENABLE Low to RESET Low (t
TR
)
Full
IV
10
ns
Minimum RESET High to Start Condition (t
RH
)
Full
IV
10
ns
FEC ENABLE
Minimum FEC ENABLE/DISABLE to T
X
ENABLE High (t
FH
)
Full
IV
0
ns
Minimum FEC ENABLE/DISABLE to T
X
ENABLE Low (t
FL
)
Full
IV
0
ns
(V
S
= +3.3 V
5%, R
SET
= 3.9 k , Reference Clock Frequency = 20.48 MHz with
6 REFCLK Enabled, Symbol Rate = 2.56 MS/s, = 0.25, unless otherwise noted)

≠3≠
REV. C
AD9853
CAUTION
ESD (electrostatic discharge) sensitive device. Electrostatic charges as high as 4000 V readily
accumulate on the human body and test equipment and can discharge without detection.
Although the AD9853 features proprietary ESD protection circuitry, permanent damage may
occur on devices subjected to high energy electrostatic discharges. Therefore, proper ESD
precautions are recommended to avoid performance degradation or loss of functionality.
Parameter
Temp
Test Level
Min
Typ
Max
Units
TIMING CHARACTERISTICS (Continued)
Wake-Up Time≠PLL Power-Down
+25
∞
C
IV
1
ms
Wake-Up Time≠DAC Power-Down
+25
∞
C
IV
200
µ
s
Wake-Up Time≠Digital Power-Down
+25
∞
C
IV
5
µ
s
Data Latency (t
DL
)
+25
∞
C
IV
6
Symbols
Minimum RESET Pulsewidth Low (t
RL
)
+25
∞
C
IV
10
ns
CMOS LOGIC INPUTS
Logic "1" Voltage, +5 V Supply
+25
∞
C
I
+3.5
V
Logic "1" Voltage, +3.3 V Supply
+25
∞
C
I
+3.0
V
Logic "0" Voltage
+25
∞
C
I
+0.4
V
Logic "1" Current
+25
∞
C
I
12
µ
A
Logic "0" Current
+25
∞
C
I
12
µ
A
Input Capacitance
+25
∞
C
V
3
pF
POWER SUPPLY
2
+V
S
Current (+3.3 V + 5%)
Full Operating Conditions
+25
∞
C
I
184
230
mA
With PLL Power-Down Enabled
+25
∞
C
I
178
224
mA
With DAC Power-Down Enabled
+25
∞
C
I
170
216
mA
With Digital Power-Down Enabled
+25
∞
C
I
36
54
mA
With All Power-Down Enabled
+25
∞
C
I
16
20
mA
+V
S
Current (+5 V + 5%)
+25
∞
C
I
400
595
mA
NOTES
1
Reference clock = 28 MHz with clock multiplier enabled; supply voltage = +5 V.
2
Maximum values are obtained under worst case operating modes. Typical values are valid for most applications.
Specifications subject to change without notice.
EXPLANATION OF TEST LEVELS
Test Level
I
≠ 100% Production Tested.
III ≠ Sample Tested Only.
IV ≠ Parameter is guaranteed by design and characterization
testing.
V
≠ Parameter is a typical value only.
VI ≠ Devices are 100% production tested at +25
∞
C and
guaranteed by design and characterization testing for
industrial operating temperature range.
ABSOLUTE MAXIMUM RATINGS*
Maximum Junction Temperature . . . . . . . . . . . . . . . +150
∞
C
V
S
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . +6 V
Digital Inputs . . . . . . . . . . . . . . . . . . . . . . . . . ≠0.7 V to +V
S
Digital Output Current . . . . . . . . . . . . . . . . . . . . . . . . . 5 mA
Storage Temperature . . . . . . . . . . . . . . . . . . ≠65
∞
C to +150
∞
C
Operating Temperature . . . . . . . . . . . . . . . . . ≠40
∞
C to +85
∞
C
Lead Temperature (10 sec Soldering) . . . . . . . . . . . . +300
∞
C
MQFP
JA
Thermal Impedance . . . . . . . . . . . . . . . . . 36
∞
C/W
*Absolute maximum ratings are limiting values, to be applied individually, and
beyond which the serviceability of the circuit may be impaired. Functional
operability under any of these conditions is not necessarily implied. Exposure of
absolute maximum rating conditions for extended periods of time may affect device
reliability.
WARNING!
ESD SENSITIVE DEVICE
ORDERING GUIDE
Temperature
Package
Package
Model
Range
Description
Option
AD9853AS ≠40
∞
C to +85
∞
C Metric Quad Flatpack S-44A
(MQFP)

AD9853
≠4≠
REV. C
PIN FUNCTION DESCRIPTIONS
Pin #
Pin Name
Pin Function
1, 7, 9, 10,
36, 39, 44 DGND
Digital Ground
2, 8, 37,
40, 43
DVDD
Digital Supply Voltage
3
Control Bus Clock
Bit Clock for Control Bus
Data
4
Control Bus Data In Control Bus Data In
5
FEC Enable
Enables/Disables FEC
6
Address Bit
Address Bit for Control Bus
11, 26, 31 Test Data Out
Factory Use--Serial Test Data
Out
12, 13
PLL GND
PLL Ground
14
PLL VCC
Supply Voltage for PLL
15
PLL Filter
PLL Loop Filter Connection
16, 19, 23 AGND
Analog Ground
17
NC
No Connect
18
DAC Rset
Rset Resistor Connection
20, 22
AVDD
Analog Supply Voltage
21
DAC Baseline
DAC Baseline Voltage
24
IOUT
Analog Current Output of the
DAC
25
IOUTB
Complementary Analog Cur-
rent Output of the DAC
27
Test CLK
Factory Use--Scan Clock
28
Test Latch
Factory Use--Scan Latch
29
Test Data In
Factory Use--Serial Test Data
In
30
Test Data Enable
Factory Use--Serial Test Data
Enable, Grounded for Normal
Operation
32
RESET
Master Device Reset Function
33
CA Enable
Cable Amplifier Enable
34
CA Clock
Cable Amplifier Serial Control
Clock
35
CA Data
Cable Amplifier Serial Control
Data
38
REF CLK IN
Reference Clock Input
41
Data In
Input Serial Data Stream
42
T
X
ENABLE
Pulse that Frames the Valid
Input Data Stream
PIN CONFIGURATION
44-Lead Metric Quad Flatpack
(S-44A)
3
4
5
6
7
1
2
10
11
8
9
40 39 38
41
42
43
44
36 35 34
37
29
30
31
32
33
27
28
25
26
23
24
PIN 1
IDENTIFIER
TOP VIEW
(Not to Scale)
12 13 14 15 16 17 18 19 20 21 22
AVDD
DAC BASELINE
AVDD
NC
PLL GND
PLL GND
AGND
CA ENABLE
PLL VCC
RESET
TEST DATA OUT
PLL FILTER
TEST DATA
ENABLE
DAC RSET
DVDD
TEST DATA IN
AGND
TEST LATCH
DGND
TEST CLK
IOUTB
AD9853
IOUT
DVDD
AGND
DGND
DGND
DGND
DVDD
CONTROL
BUS CLOCK
DVDD
CONTROL
BUS DATA IN
FEC ENABLE
ADDRESS BIT
DGND
NC = NO CONNECT
DVDD
DGND
DGND
TEST DATA
OUT
TEST DATA OUT
T
X
ENABLE
DATA IN
REF CLK IN
CA CLOCK
CA DATA
ADDRESS BIT

AD9853
≠5≠
REV. C
Table I. Modulator Function Description
Modulation Encoding Format
FSK*, QPSK, DQPSK, 16-QAM, D16-QAM, Selectable via Control Bus
Output Carrier Frequency Range
DC ≠ 63 MHz with +3.3 V Supply Voltage
DC ≠ 84 MHz with +5 V Supply Voltage
Serial Input Data Rate
Evenly Divisible Fraction of Reference Clock
Pulse-Shaping FIR Filter
41 Tap, Linear Phase, 10-Bit Coefficients Fully Programmable via Control Bus
Interpolation Range
Interpolation Rate = (4/M)
◊
(ICIC1)
◊
(ICIC2) where: M = 2 for QPSK, M = 4 for 16-QAM
Minimum and Maximum Rates
Minimum Interpolation Rate--QPSK = 2
◊
3
◊
2 = 12
16-QAM = 1
◊
4
◊
3 = 12
Maximum Interpolation Rate--QPSK = 2
◊
31
◊
63 = 3906
16-QAM = 1
◊
31
◊
63 = 1953
These are the minimum and maximum interpolation ratios from the input data rate to the
system clock. The interpolation range is a function of the fixed interpolation factor of four
in the FIR filters, the programmed CIC filter interpolation rates (ICIC1, ICIC2), as well
as system timing constraints.
Maximum Reference Clock Frequency
+3.3 V Supply: 21 MHz with 6
◊
REFCLK enabled, 126 MHz with 6
◊
REFCLK disabled
+5 V Supply: 28 MHz with 6
◊
REFCLK enabled, 168 MHz with 6
◊
REFCLK disabled
6
◊
REFCLK
Fixed 6
◊
reference clock multiplier, enable/disable control via control bus
R-S FEC
Enable/disable via control bus and dedicated control pin. Control pin enable/disable function:
Logic "1" = Enable
Logic "0" = Disable
Primitive Polynomial: p(x) = x
8
+ x
4
+ x
3
+ x
2
+ 1
Code Generator Polynomial: g(x) = (x +
0
)(x +
1
)(x +
2
) . . . (x +
2t ≠1
)
Selectable via Control Bus
t = 0≠10 (Programmable)
Codeword Length (N) = 255 max (Programmable)
N = K + 2 t (K Range = 16
K
255 ≠ 2 t)
FEC/Randomizer can be transposed in signal chain via control bus.
I/Q Channel Spectrum
I
◊
COS + Q
◊
SIN (default) or I
◊
COS ≠ Q
◊
SIN, selectable via control bus.
Preamble Insertion
0≠96 Bits, Programmable Length and Content
Randomizer
Enable/Disable Control via Control Bus
Generating Polynomial:
x
6
+ x
5
+ 1, Programmable Seed (Davic/DVB-Compliant)
or
x
15
+ x
14
+ 1, Programmable Seed (DOCSIS-Compliant)
Randomizer and FEC blocks can be transposed in signal chain, via control bus.
*In FSK mode, F0:F1 are direct DDS Cosine output. The two interpolator stages of the AD9853 are not used in the FSK mode and should be programmed for
maximum interpolation rates to reduce unnecessary current consumption. This means that Interpolator #1 should be set to a decimal value of 31, and Interpolator
#2 should be set to decimal value of 63. This is easily accomplished by programming Registers 12 and 13 (hex) with the values of FF (hex).

AD9853
≠6≠
REV. C
Table II. Control Register Functional Assignment
Register
Address
DATA
(Note 1)
D7
D6
D5
D4
D3
D2
D1
D0
00h
MSB
Value of K (Message Length in Bytes) for Reed-Solomon Encoder, where 16
10
K
255
10
(Note 2)
LSB
01h
MSB
The Number of Correctable Byte
LSB
Randomizer
Randomizer Length
(Note 3)
Errors (t) for the Reed-Solomon
Insertion
00
2
= 6 Bit
Encoder, where 0
t
10
10
.
01
2
= 15 Bit
For t = 0, the RS encoder is
0 = After RS
10
2
= Randomizer OFF
effectively disabled.
1 = Before RS
11
2
= Randomizer OFF
02h
MSB
Lower Eight Bits of Seed Value for 15-Bit Randomizer (Not Used for 6-Bit Randomizer)
LSB
03h
MSB
Upper Seven Bits of Seed Value for 15-Bit Randomizer
LSB
≠ OR ≠
Seed Value for 6-Bit Randomizer (D1 not used in this case).
04h
MSB
Preamble Length (L) where 0
L
96 Bits (Note 4)
LSB
05h
Modulation Mode
000
2
= QPSK , 001
2
= DQPSK, 010
2
= 16-QAM
011
2
= D16-QAM , 100
2
= FSK
06h
The MSB of the preamble always resides in D7 of Address 11h and is the first preamble bit to be clocked out of the device during transmission of
:
a packet. Up to 96 bits of preamble are available as specified in Register 04h. Unused bits are don't care for L < 96.
11h
MSB
Preamble Data. (Note 5)
12h
MSB
Interpolator #1: RATE
LSB
Rate Change Factor (R) where 3
10
R
31
10
13h
MSB
Interpolator #2: RATE
LSB
Rate Change Factor (R) where 2
10
R
63
10
14h
MSB
Interpolator #1: SCALE
LSB
2
◊
Multiplier
0 = OFF
1 = ON
15h
6
MSB
Interpolator #2: SCALE
LSB
16h
Frequency Tuning Word #1
LSB
:
FSK Mode: Specifies the "space" frequency (F0).
19h
MSB
All Other Modes: Specifies the carrier frequency.
1Ah
Frequency Tuning Word #2
LSB
:
FSK Mode: Specifies the "mark" frequency (F1).
1Dh
MSB
(Addresses 1Ah≠1Dh are only valid for FSK mode.)
1Eh
5
MSB-2
MSB-3
10-Bit FIR End Tap Coefficient, a
0
LSB
0
1Fh
MSB
0
MSB-1
<-- -- -- -- -- -- -- -- -- -- -- -- -- -- Unused Bits -- -- -- -- -- -- -- -- -- -- -- -- -- -->
:
:
FIR Intermediate Tap Coefficients, a
1
≠ a
19
:
46h
MSB-2
MSB-3
10-Bit FIR Center Tap Coefficient, a
20
LSB
20
47h
MSB
20
MSB-1
<-- -- -- -- -- -- -- -- -- -- -- -- -- -- Unused Bits -- -- -- -- -- -- -- -- -- -- -- -- -- -->
Spectrum
Digital Power
6
◊
RefClk
PLL Mode
DAC Mode
48h
0 = I
◊
Cos + Q
◊
Sin
0 = Normal
0 = Off
0 = Awake
0 = Awake
(Note 7)
1 = I
◊
Cos ≠ Q
◊
Sin
1 = Shutdown
1 = On
1 = Sleep
1 = Sleep
49h
AD8320 Cable Driver Gain Control Byte (GCB)
(Note 8)
MSB
The absolute gain, A
V
, of the AD8320 is given by: A
V
= 0.316 + 0.077
◊
GCB (where 0
GCB
255
10
)
LSB
NOTES
1
The 8-bit Register Address is preceded by an 8-bit Device Address, which is given by
000001XY, where the value of Bits X and Y are determined as follows:
X
Voltage Applied to Pin 6
Y
Desired Register Function
0
GND
0
WRITE
1
+V
S
1
READ
2
This register must be loaded with a nonzero value even if the RS encoder has been
disabled by setting T = 0 in register 01h.
3
Unused regions are don't care bit locations.
4
If a preamble is not used this register must be initialized to a value of 0 by the user.
5
Addresses 06h≠011h and 1Eh≠47h are write only.
6
Readback of register 15h results in a value that is 2
◊
the actual programmed value.
This is a design error in the readback function.
7
Assertion of RESET (Pin 32) sets the contents of this register to 0.
8
Registers 0h≠48h may be written to using a single register address followed by a
contiguous data sequence (see Figure 27). Register 49h, however, must be written to
individually; i.e., a separately addressed 8-bit data sequence.

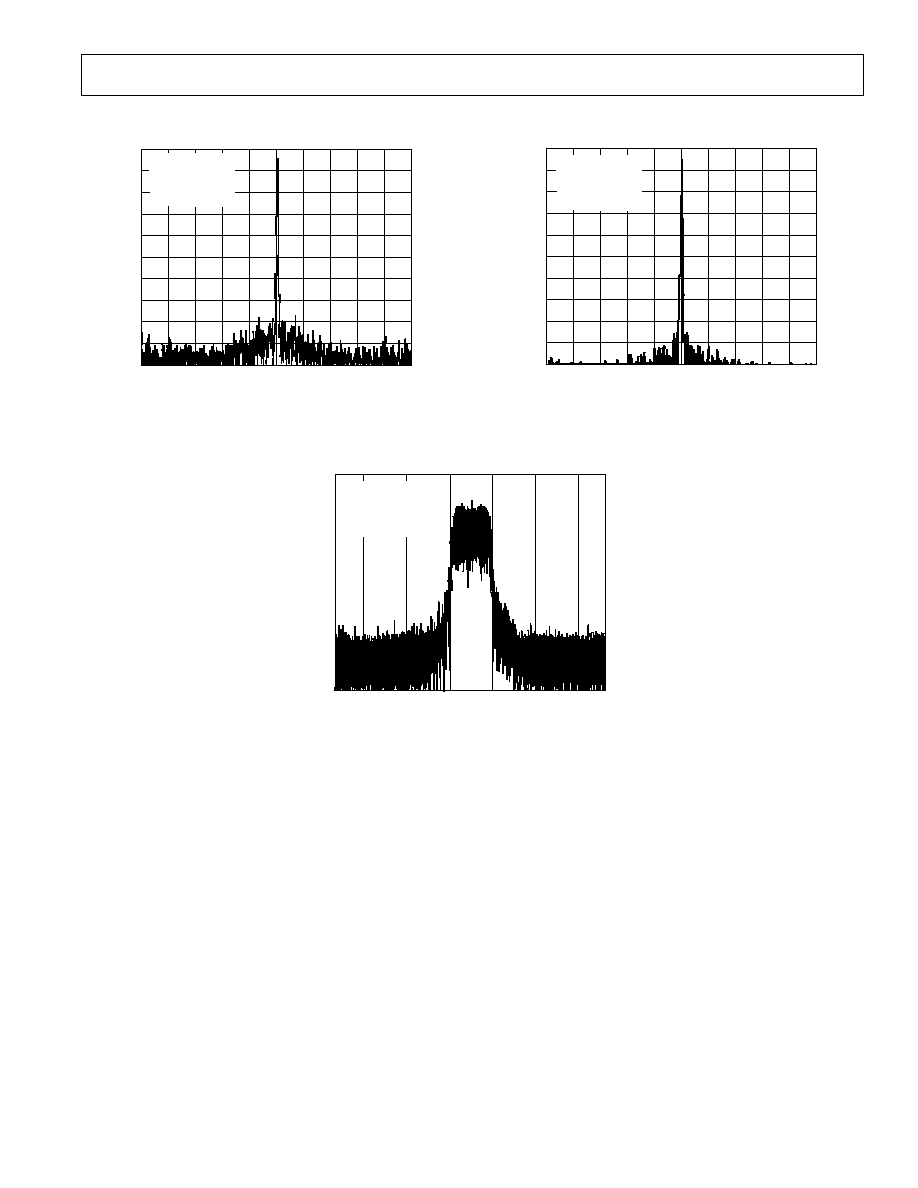
Modulated Output Spectrum with 3.3 V Supply,
= 0.25, 20.48 MHz REFCLK
Typical Performance Characteristics≠AD9853
≠7≠
REV. C
0
≠10
≠100
START 0Hz
STOP 60MHz
6MHz/
≠40
≠70
≠80
≠90
≠20
≠30
≠60
≠50
RBW = 3kHz
VBW = 3kHz
SWT = 17s
RF ATT = 10dB
REF LVL = ≠20dBm
Figure 1. QPSK, 320 kb/s, A
OUT
= 10 MHz
0
≠10
≠100
START 0Hz
STOP 60MHz
6MHz/
≠40
≠70
≠80
≠90
≠20
≠30
≠60
≠50
RBW = 3kHz
VBW = 3kHz
SWT = 17s
RF ATT = 10dB
REF LVL = ≠20dBm
Figure 2. QPSK, 640 kb/s, A
OUT
= 20 MHz
0
≠10
≠100
START 0Hz
STOP60 MHz
6MHz/
≠40
≠70
≠80
≠90
≠20
≠30
≠60
≠50
RBW = 3kHz
VBW = 3kHz
SWT = 17s
RF ATT = 10dB
REF LVL = ≠20dBm
Figure 3. QPSK, 1.28 Mb/s, A
OUT
= 42 MHz
0
≠10
≠100
START 0Hz
STOP 60MHz
6MHz/
≠40
≠70
≠80
≠90
≠20
≠30
≠60
≠50
RBW = 3kHz
VBW = 3kHz
SWT = 17s
RF ATT = 10dB
REF LVL = ≠20dBm
Figure 4. QPSK, 1.28 Mb/s, A
OUT
= 10 MHz
0
≠10
≠100
START 0Hz
STOP 60MHz
6MHz/
≠40
≠70
≠80
≠90
≠20
≠30
≠60
≠50
RBW = 3kHz
VBW = 3kHz
SWT = 17s
RF ATT = 10dB
REF LVL = ≠20dBm
Figure 5. QPSK, 2.56 Mb/s, A
OUT
= 20 MHz
0
≠10
≠100
START 0Hz
STOP60 MHz
6MHz/
≠40
≠70
≠80
≠90
≠20
≠30
≠60
≠50
RBW = 3kHz
VBW = 3kHz
SWT = 17s
RF ATT = 10dB
REF LVL = ≠20dBm
Figure 6. QPSK, 5.12 Mb/s, A
OUT
= 42 MHz

AD9853
≠8≠
REV. C
0
0
0
0
0
0
0
0
0
0
0
≠10
≠100
START 0Hz
STOP 60MHz
6MHz/
≠40
≠70
≠80
≠90
≠20
≠30
≠60
≠50
RBW = 3kHz
VBW = 3kHz
SWT = 17s
RF ATT = 30dB
REF LVL = 0dBm
Figure 8. A
OUT
= 1 MHz
0
0
0
0
0
0
0
0
0
0
0
≠10
≠100
START 0Hz
STOP 60MHz
6MHz/
≠40
≠70
≠80
≠90
≠20
≠30
≠60
≠50
RBW = 3kHz
VBW = 3kHz
SWT = 17s
RF ATT = 30dB
REF LVL = 0dBm
Figure 9. A
OUT
= 42 MHz
Modulated Output Spectrum with 5 V Supply, = 0.25, 27.5 MHz REFCLK
0
≠10
≠10
0 START 0Hz
STOP 80MHz
8MHz/
≠40
≠70
≠80
≠90
≠20
≠30
≠60
≠50
RBW = 3kHz
VBW = 3kHz
SWT = 22.5s
RF ATT = 10dB
REF LVL = ≠20dBm
Figure 7. QPSK, 1.375 Mb/s, A
OUT
= 65 MHz
Single Tone Output Spectrum with +3.3 V Supply, 20.48 MHz REFCLK
0
0
0
0
0
0
0
0
0
0
0
≠10
≠100
START 0Hz
STOP 60MHz
6MHz/
≠40
≠70
≠80
≠90
≠20
≠30
≠60
≠50
RBW = 3kHz
VBW = 3kHz
SWT = 17s
RF ATT = 30dB
REF LVL = 0dBm
Figure 11. A
OUT
= 20 MHz
0
0
0
0
0
0
0
0
0
0
0
≠10
≠100
CENTER 40Hz
SPAN 80MHz
8MHz/
≠40
≠70
≠80
≠90
≠20
≠30
≠60
≠50
RBW = 5kHz
VBW = 5kHz
SWT = 8s
RF ATT = 30dB
REF LVL = 0dBm
Figure 12. A
OUT
= 65 MHz
(+5 V Supply, 27.5 MHz REFCLK)
0
≠10
≠100
START 0 Hz
STOP 80 MHz
8 MHz/
≠40
≠70
≠80
≠90
≠20
≠30
≠60
≠50
RBW = 3kHz
VBW = 3kHz
SWT = 22.5s
RF ATT = 10dB
REF LVL = ≠20dBm
Figure 10. QPSK, 5.5 Mb/s, A
OUT
= 65 MHz
AD9853
≠9≠
REV. C
Output Phase Noise Plots, A
OUT
= 40 MHz
0
≠10
≠100
CENTER 40Hz
SPAN 10MHz
1kHz/
≠40
≠70
≠80
≠90
≠20
≠30
≠60
≠50
RBW = 30Hz
VBW = 30Hz
SWT = 56s
RF ATT = 20dB
REF LVL = ≠1dBm
Figure 13. 6 REFCLK Enabled
CH PWR = ≠6.98dBm
ACP UP = ≠44.95dBm
ACP LOW = ≠44.66dBm
ALT1 UP = ≠65.96dBm
ALT1 LOW = ≠65.99dBm
Figure 15. Adjacent Channel Power, A
OUT
= 30 MHz,
2.56 MS/s, Channel BW = 3.2 MHz (
= 0.25)
0
≠10
≠100
CENTER 40Hz
SPAN 10kHz
1kHz/
≠40
≠70
≠80
≠90
≠20
≠30
≠60
≠50
RBW = 30Hz
VBW = 30Hz
SWT = 56s
RF ATT = 20dB
REF LVL = ≠1dBm
Figure 14. 6 REFCLK Disabled
AD9853
≠10≠
REV. C
SYMBOLS
1.2
≠1.2
0
T1
3
REF LVL
≠8dBm
CF 42MHz MEAS SIGNAL
SR 1.28MHz EYE [1]
DEMOD 16QAM
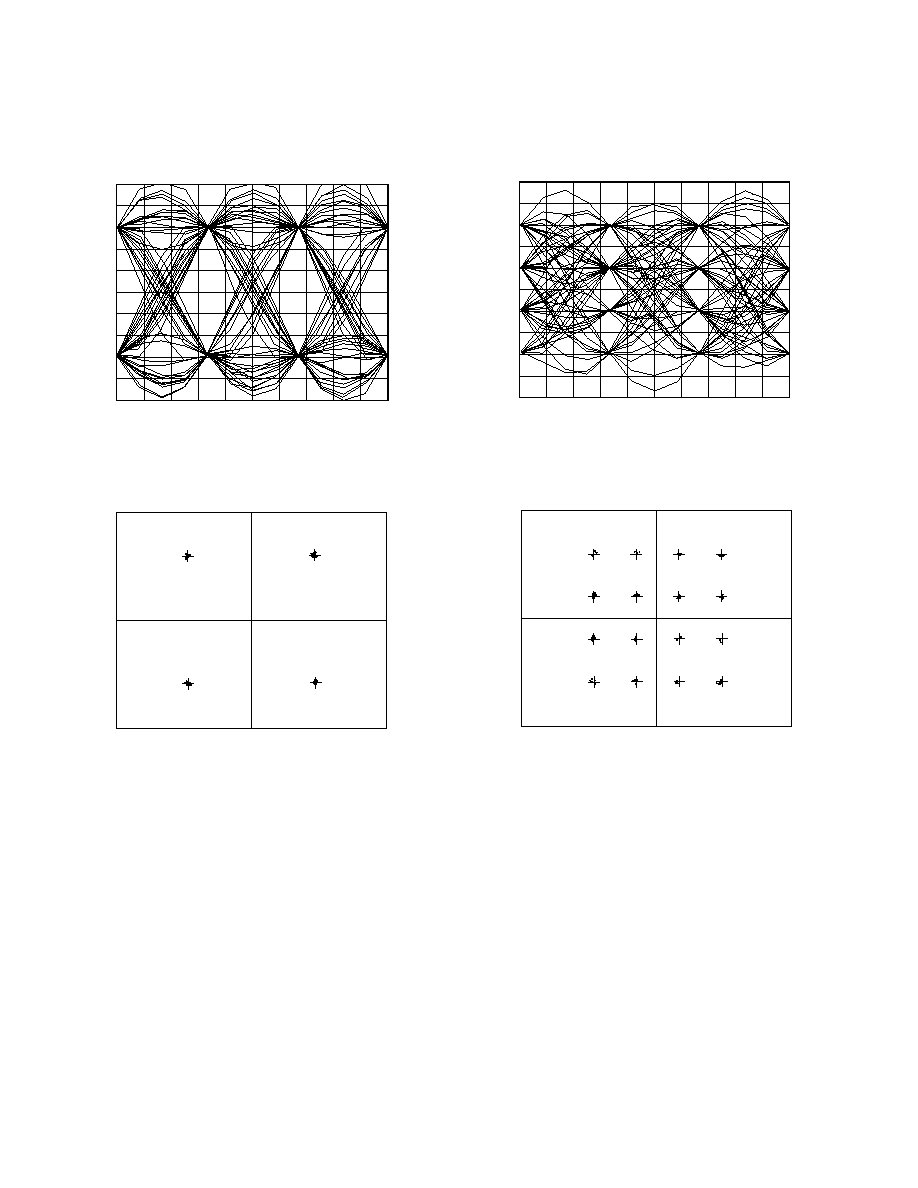
Figure 18. 16-QAM Modulation
1.2
≠1.2
≠1.5
1.5
REAL
T1
REF LVL
≠8dBm
CF 42MHz MEAS SIGNAL
SR 1.28MHz CONSTELLATION
DEMOD 16QAM
Figure 19. 16-QAM Modulation
SYMBOLS
1.2
≠1.2
0
T1
3
REF LVL
≠7dBm
CF 42MHz MEAS SIGNAL
SR 1.28MHz EYE [1]
DEMOD QPSK
Figure 16. QPSK Modulation
1.2
≠1.2
≠1.5
1.5
REAL
T1
REF LVL
≠7dBm
CF 42MHz MEAS SIGNAL
SR 1.28MHz CONSTELLATION
DEMOD QPSK
Figure 17. QPSK Modulation
Typical Plots of Eye Diagrams and Constellations

AD9853
≠11≠
REV. C
MAX CLOCK RATE ≠ MHz
AMBIENT TEMP ≠
C
95
85
45
110 115
170
120 125 130 135 140 145 150 155 160 165
75
65
55
BIT RATE >2Mb/s
VCC = +5V
CONTINUOUS MODE
Figure 20. Max CLK Rate vs. Ambient Temperature
(To Ensure Max Junction Temp is Not Exceeded)
BIT RATE ≠ Mb/s
POWER ≠ Watts
2.6
1.2
0
0.5
3.5
1.0
1.5
2.0
2.5
3.0
2.4
2.0
1.8
1.6
1.4
2.2
VCC = +5.0V
CLK = 165MHz
CONTINUOUS MODE
VCC = +4.0V
Figure 21. Power Consumption vs. Bit Rate
BIT RATE ≠ Mb/s
SPURIOUS IN-BAND EMISSION ≠ dBc
≠45
≠60
5.12
2.56
0.64
1.28
≠50
≠55
CLK = 122.88 MHz
VCC = +3.3V
≠40
A
OUT
= 42MHz
A
OUT
= 32MHz
A
OUT
= 22MHz
A
OUT
= 12MHz
Figure 22. Spurious Emission vs. Bit Rate vs. A
OUT
BIT RATE ≠ Mb/s
POWER ≠ Watts
0.80
0.75
0.55
0
1
6
2
3
4
5
0.70
0.65
0.60
CLK = 122.88 MHz
VCC = +3.3V
CONTINUOUS MODE
Figure 23. PWR Consumption vs. Bit Rate
BURST MODE DUTY CYCLE ≠ %
POWER ≠ Watts
2.4
1.9
0
20
100
40
60
80
2.3
2.2
2.1
2.0
2.5
CLK = 165MHz
VCC = +5.0V
BIT RATE = 3.4Mb/s
Figure 24. Power Consumption vs. Burst Duty Cycle
≠40
≠42
≠52
3.5
1.75
0.44
0.88
≠44
≠46
≠50
≠48
BIT RATE ≠ Mb/s
SPURIOUS IN-BAND EMISSION ≠ dBc
A
OUT
= 65MHz
A
OUT
= 40MHz
A
OUT
= 20MHz
CLK = 165MHz
VCC = +4.0V TO +5.0V
Figure 25. Spurious Emission vs. Bit Rate vs. A
OUT

AD9853
≠12≠
REV. C
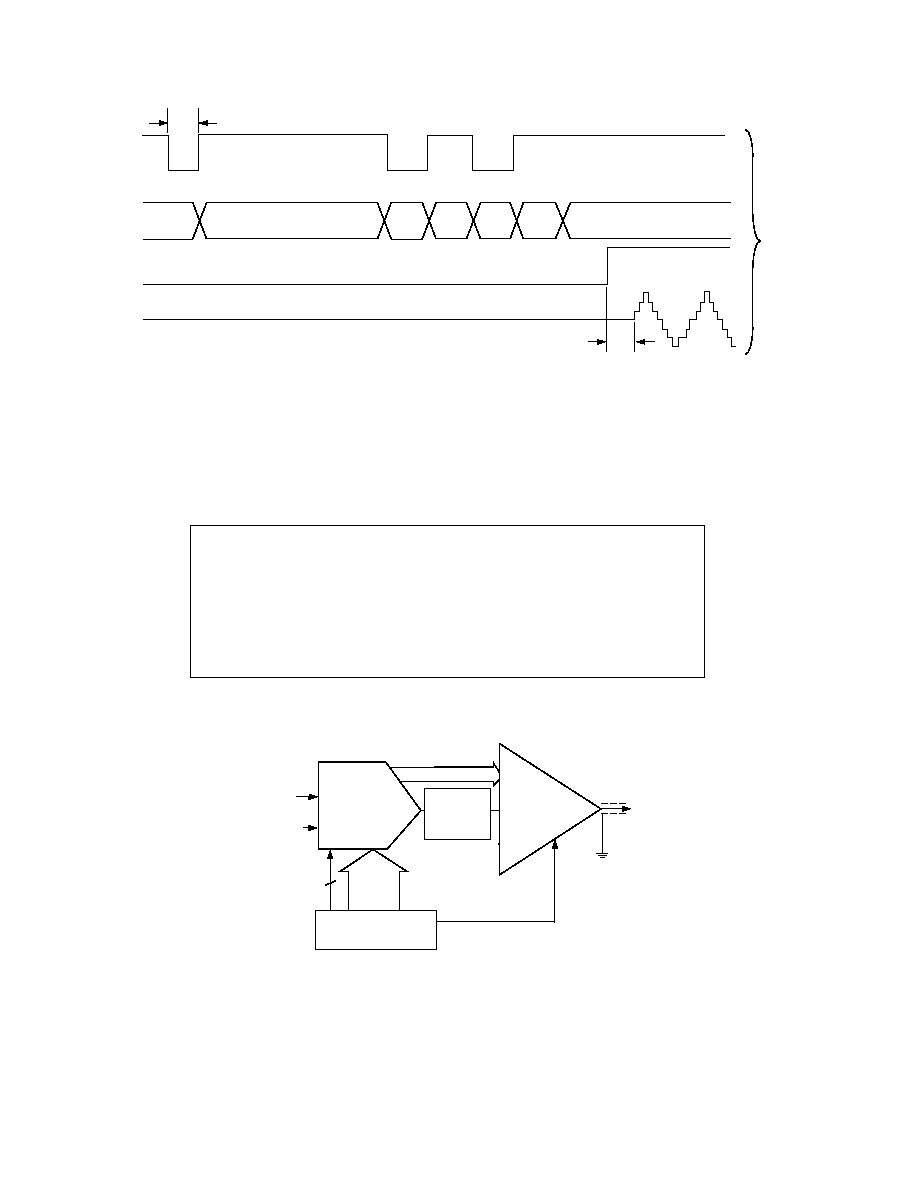
NOTES ON BURST TRANSMISSION OPERATION:
1. PACKET LENGTH = NUMBER OF INFORMATION BYTES, K
2. IN FEC MODE T
X
ENABLE MUST BE KEPT HIGH FOR N (K+2T) BYTES WHERE N IS THE NUMBER OF CODEWORDS
3. IF NECESSARY, ZERO FILL THE LAST CODEWORD TO REACH ASSIGNED K DATA BYTES PER CODEWORD
4. THE INPUT DATA IS SAMPLED AT THE BIT RATE FREQUENCY (f
B
) WITH THE FIRST SAMPLE TAKEN AT SECONDS AFTER THE
RISING EDGE OF T
X
ENABLE
5. PREAMBLE DELAY =
6. DATA RATE MUST BE EXACT SUB-MULTIPLE OF REFERENCE CLOCK.
1
2 (f
B
)
(# OF PREAMBLE BITS)
(BIT RATE FREQUENCY)
FRAME STRUCTURE: MIN T
X
ENABLE LOW TIME = PREAMBLE + 8 SYMBOLS. (EQUATES TO 8 SYMBOLS
MINIMUM SPACING BETWEEN BURSTS WITH NO CHANGE IN PROFILE)
T
X
ENABLE
NOTE: DATA RATE MUST BE PRECISELY
SYNCHRONIZED WITH RISING EDGE
OF T
X
ENABLE
D1
D2
D3
D4
D5
D6
D7
DN
DON'T CARE
D1
D2
D3
D4
D5
D6
D7 DN
DON'T CARE
DATA PACKET = K BYTES
FEC PARITY
(2T BYTES)
FEC PARITY
(2T BYTES)
DATA PACKET = K BYTES
T
X
ENABLE TO
A
OUT
LATENCY
DATA IN
INTERNAL CODE-
WORD STRUCTURE
AT R-S OUTPUT
FRAME STRUCTURE FOR MULTIPLE CODE WORDS OR CONTINOUS TRANSMISSION:
D1
D2
D3
D4
D5
D6
D7 DN
DON'T CARE
D1
D2
D3 D4
D5
D6
D7 DN
DON'T CARE
DATA PACKET = K BYTES
FEC PARITY
(2T BYTES)
DATA PACKET = K BYTES
FEC PARITY
(2T BYTES)
T
X
ENABLE
DATA IN
INPUT DATA PROCESSING:
T
X
ENABLE
D1
D59
DN
D60
D61
D62
D63
D64
D65
D1
D2
D2
D3
D4
D5
DATA
PACKET
AND
FEC PARITY
CODEWORD(S)
PREAMBLE
COMPLETE FRAME AS PRESENTED TO MODULATOR ENCODER:
INTERNAL
BIT CLOCK
DATA IN
ENCODER
INPUT
PREAMBLE LENGTH = 96 BITS MAXIMUM
DURING THIS INTERVAL THE DATA IS R-S ENCODED, RANDOMIZED, AND
DELAYED TO SYNCHRONIZE WITH THE END OF THE PREAMBLE DATA.
ONE CODEWORD
ONE CODEWORD
PREAMBLE INSERTION
Figure 26. Data Framing and Processing

AD9853
≠13≠
REV. C
S
DEVICE ADDRESS
A(S)
REGISTER ADDRESS
A(S)
DATA
A(S)
WRITE
DATA
A(S)
P
S
DEVICE ADDRESS
A(S)
REGISTER ADDRESS
A(S)
READ
DATA
A
(M)
P
DEVICE ADDRESS
A(S)
DATA
S
A(M)
LSB = 0
LSB = 1
A(S) = ACKNOWLEDGE BY SLAVE
A(M) = ACKNOWLEDGE BY MASTER
S = START CONDITION
P = STOP CONDITION
A
(M) = NO ACKNOWLEDGE BY MASTER
Figure 27. Serial Control Bus--Read and Write Sequences
R/W
MSB
A
1
0
0
0
0
0
LSB
0 = WRITE / 1 = READ
ADDRESS CONTROL
(SET VIA DEVICE PIN 6)
Figure 28. Serial Control Bus--8-Bit Device Address Detail
t
FH
t
FL
FEC DISABLE/
ENABLE CONTROL
T
X
ENABLE
t
FH
= FEC TO T
X
ENABLE SETUP TIME = 0ns
t
FL
= FEC TO T
X
ENABLE HOLD TIME = 0ns
Figure 29. FEC Enable/Disable Timing Diagram
t
TR
t
RL
T
X
ENABLE
RESET
CONTROL CLOCK
CONTROL DATA
t
RH
t
PWH
t
PWL
t
CH
t
DS
t
DH
t
CS
t
TR
= MINIMUM T
X
ENABLE LOW TO RESET LOW = 10ns
t
RL
= MINIMUM RESET PULSEWIDTH = 10ns
t
RH
= MINIMUM RESET TO START CONDITION = 10ns
t
CH
= MINIMUM CLOCK HOLD TIME START CONDITION = 10ns
t
CS
= MINIMUM CLOCK SETUP TIME STOP CONDITION = 10ns
t
DS
= MINIMUM DATA SETUP TIME = 10ns
t
DH
= MINIMUM DATA HOLD TIME = 10ns
t
PWH
=
t
PWL
= MINIMUM CLOCK PULSEWIDTH HIGH/LOW = 10ns
t
MP
= MINIMUM CLOCK PERIOD = 40ns = 25MHz
t
MP
Figure 30. Serial Control Interface Timing Diagram
AD9853
≠14≠
REV. C
DIGITAL
QPSK/16≠QAM
MODULATOR
CONTROL PROCESSOR
SERIAL
CONTROL
BUS
GAIN CONTROL BUS
COUPLING
CIRCUIT AND
LP FILTER
POWER
DOWN
AD9853
DIRECT
CONTROL
LINES
DATA IN
REF
CLOCK IN
PROGRAMMABLE
CABLE DRIVER
AMPLIFIER
AD8320
TO
DIPLEXER
CONTROL
PROCESSOR
Figure 32. Basic Implementation of AD9853 Digital Modulator and AD8320 Programmable Cable Driver Amplifier in
Return-Path Application
t
RL
RESET
NOTE 1
NOTE
2
NOTE
2
CONTROL BUS
T
X
ENABLE
DAC OUT
t
DL
t
RL
: MINIMUM RESET LOW TIME = 10ns
t
DL
: DATA LATENCY = 6 SYMBOLS
NOTE 1. DURING THIS INTERVAL ALL CONTROL BUS REGISTERS MUST BE PROGRAMMED.
NOTE 2. DURING THIS INTERVAL THE CONTROL REGISTER (48h) MAY NEED TO BE REPROGRAMMED DUE TO BEING CLEARED
BY THE PRECEDING RESET PULSE.
NOTE 3. THREE RESETS ARE REQUIRED TO ENSURE THAT THE DATA PATH IS ZERO'D.
START UP
SEQUENCE
Figure 31. Recommended Start-Up Sequence
NOTES ON THE RESET FUNCTION:
1. RESET IS ACTIVE LOW
2. RESET ZEROS THE CONTROL REGISTER AT ADDRESS 48 HEX WHICH CAUSES THE FOLLOWING DEFAULT
CONDITION TO EXIST:
A. 6 REFCLK IS DISABLED
B. OUTPUT SPECTRUM IS SET TO I COS+Q SIN
C. DIGITAL PLL POWER-DOWN IS DISABLED
D. PLL POWER-DOWN IS DISABLED
E. DAC PLL POWER-DOWN IS DISABLED
3. SERIAL CONTROL BUS IS RESET AND INITIALIZED.
4. OUTPUTS OF MODULATION ENCODERS ARE SET TO ZERO. THIS ALLOWS THE FIR FILTERS AND
SUBSEQUENT INTERPOLATION FILTERS TO BE FLUSHED WITH ZEROS AS LONG AS T
X
ENABLE IS HELD LOW.
5. THE PREAMBLE IS CLEARED UPON EXECUTION OF THE RESET FUNCTION.

AD9853
≠15≠
REV. C
THEORY OF OPERATION
The AD9853 is a highly integrated modulator function that has
been specifically designed to meet the requirements of the HFC
upstream function for both interoperable and proprietary system
implementations. The AD8320 is a companion cable driver
amplifier with a digitally-programmable gain function, that
interfaces to the AD9853 modulator and directly drives the
cable plant with the modulated carrier. Together, the AD9853
and AD8320 provide an easily implementable transmitter solu-
tion for the HFC return-path requirement.
CONTROL AND DATA INTERFACE
As shown in the device's block diagram on the front page, the
various transmit parameters, which include the input data rate,
modulation format, FEC and randomizer configurations, as well
as all the other modulator functions, are programmed into the
AD9853 via a serial control bus. The AD8320 cable driver amp
gain can be programmed directly from the AD9853 via a 3-wire
bus by writing to the appropriate AD9853 register. The AD9853
also contains dedicated pins for FEC enable/disable and a RESET
function.
Note: T
X
ENABLE pin must be held low for the duration of all
serial control bus operations.
The AD9853's serial control bus consists of a bidirectional data
line and a clock line. Communication is initiated upon a start
condition, which is defined as a high-to-low transition of the
data line while the clock is held high. Communication terminates
upon a stop condition, which is defined as a low-to-high transi-
tion in the data line while the clock is held high. Ordinarily, the
data line transitions only while the clock line is low to avoid a
start or stop condition. Data is always written or read back in
8-bit bytes followed by a single acknowledge bit. The micro-
controller or ASIC (i.e., the bus master) transfers eight data bits
and the AD9853 (i.e., the slave) issues the acknowledge bit. The
acknowledge bit is active low and is clocked out on every ninth
clock pulse. The bus master must three-state the data line dur-
ing the ninth clock pulse and allow the AD9853 to pull it low.
A valid write sequence consists of a minimum of three bytes.
This means 27 clock pulses (three bytes with nine clock pulses
each) must be provided by the bus master. The first byte is a
chip address byte that is predefined except for Bit Positions 1
and 0. Bit Positions 7, 6, 5, 4 and 3 must be zero. Bit Position 2
must be a one. Bit 1 is set according to the external address pin
on the AD9853 (1 if the pin is connected to +V
S
; 0 if the pin
is grounded). Bit 0 is set to 1 if a read operation is desired, 0 if a
write operation is desired. The second byte is a register address
with valid addresses between 00h and 49h. An address which is
outside of this range will not be acknowledged. The third byte is
data for the address register. Multiple data bytes are allowed
and loaded sequentially. That is, the first data byte is written to
the addressed register and any subsequent data bytes are written
to subsequent register addresses. It is permissible to write all
registers by issuing a valid chip address byte, then an address
byte of 00h and then 72 (48h) data bytes. Address 49h must be
written independently, that is, not in conjunction with any other
address.
A valid read sequence consists of a minimum of four bytes (refer
to Figure 27). This means the bus master must provide 36 clock
pulses (four bytes with nine clock pulses each). Like the write
sequence, the first two bytes are the Chip Address Byte, with the
read/write bit set to 0, and the readback register address. After
the slave provides an acknowledge at the end of the register
address, the master must present a START condition on the
bus, followed by the Chip Address Byte with the read/write bit
set to a 1. The slave proceeds to provide an acknowledge. Dur-
ing the next eight clocks the slave will write to the bus from the
register address. The master must provide an acknowledge on
the ninth clock of this byte. Any subsequent clocks from the
master will force the slave to read back from subsequent regis-
ters. At the end of the read-back cycle, the MASTER must force
a "no-acknowledge" and then a STOP condition. This will take
the SLAVE out of read-back mode. Not all of the serial control
bus registers can be read back. Registers (06h≠11h) and (1Eh≠
47h) are write only. Also, like the writing procedure, register
49h must be read from independently.
INPUT DATA SYNCHRONIZATION
The serial input data interface consists of two pins, the serial
data input pin and a T
X
ENABLE pin. The input data arrives at
the bit rate and is framed by the T
X
ENABLE signal as shown in
Figure 26. A high frequency sampling clock continuously
samples the T
X
ENABLE signal to detect the rising edge. Once
the rising edge of T
X
ENABLE is detected, an internal sampler
strobes the serial data at the correct point in time relative to the
positive T
X
ENABLE transition and then continues to sample at
the correct interval based on the programmed Input Data rate.
For proper synchronization of the AD9853, 1) the input burst
data must be accurately framed by T
X
ENABLE and 2) the
input data rate must be an exact even submultiple of the system
clock. Typically this will require that the input data rate clock be
synchronized with reference clock.
REED-SOLOMON ENCODER
The AD9853 contains a programmable Reed-Solomon (R-S)
encoder capable of generating an (N, K) code where N is the
code word length and K is the message length.
Error correction becomes vital to reliable communications when
the transmission channel conditions are less than ideal. The
original message can be precisely reconstructed from a cor-
rupted transmission as long as the number of message errors is
within the encoder's limits. When forward error correction
(FEC) is engaged, either through the serial control interface
bus or hardware (logic high at Pin 5), it is implemented using
the following MCNS-compatible field generator and primitive
polynomials:
Primitive Polynomial:
p(x) = x
8
+ x
4
+ x
3
+ x
2
+ 1
Code Generator Polynomial: g(x) = (x + a
0
)(x + a
1
)(x + a
2
)
. . . (x + a
2t ≠ 1
)
The code-word structure is defined as follows:
N = K + 2t (bytes)
where:
N = code-word length
K = message length (in bytes), programmable from 16≠255
t =
number of byte errors that can be corrected programmable
from 0≠10.
A Code Word is the sum of the Message Length (in bytes) and
number of Check Bytes required to correct byte errors at the

AD9853
≠16≠
REV. C
receive end. The values actually programmed on the serial con-
trol bus are "K" and "t," which will define N as shown in the
above code-word structure equation. As can be seen from the
code-word structure equation, two check bytes are required to
correct each byte error. Setting t = 0 and K > 0 will bypass the
Reed-Solomon encoding process.
Since Reed-Solomon works on bytes of information and not
bits, a single byte error can be as small as one inverted bit out of
a byte, or as large as eight inverted bits of one byte; in either
instance the result is one byte error. For example, if the value
"t" is specified as 5, the R-S FEC could be correcting as many
as 40, or as few as 05, erroneous bits, but those errors must be
contained in 5 message bytes. If the errors are spread among
more than five bytes, the message will not be fully error corrected.
When using the R-S encoder, the message data needs to be
partitioned or "gapped" with "don't care" data for the time
duration of the check bytes as shown in the timing diagram of
Figure 26. During the intervals between message data, the de-
vice ignores data at the input.
The position of the R-S encoder in the coding data path can be
switched with the randomizer by exercising Register 1, Bit D3,
via the serial control bus.
RANDOMIZER FUNCTION
The next stage in the modulation chain is the randomizing or
"scrambling" stage. Randomizing is necessary due to the fact
that impairments in digital transmission can be a function of the
statistics of the digital source. Receiver symbol synchronization
is more easily maintained if the input sequence appears random
or equiprobable. Long strings of 0s or 1s can cause a bit or
symbol synchronizer to lose synchronization. If there are repeti-
tive patterns in the data, discrete spurs can be produced, caus-
ing interchannel interference. In modulation schemes relying on
suppressed carrier transmission, nonrandom data can increase
the carrier feedthrough. Using a randomizer effectively "whitens"
the data.
The technique used in the AD9853 to randomize the data is to
perform a modulo 2 logic addition of the data with a pseudo-
random sequence. The pseudorandom sequence is generated by
a shift register of length m with an exclusive OR combination of
the nth bit and the last (mth) bit of the shift register that is fed
back to the shift register input. By choosing the appropriate
feedback point, a maximal length sequence is generated. The
maximal length sequence will repeat after every 2
m
clock cycles,
but appears effectively "random" at the output. The criterion
for maximal length is that the polynomial 1 + x
n
+ x
m
be irre-
ducible and prime over the Galois field. The AD9853 contains
the following two polynomial configurations in hardware:
x
15
+ x
14
+1 :MCNS (DOCSIS) compatible.
x
6
+ x
5
+1
:DAVIC/DVB compatible.
The seed value is fully programmable for both configurations.
The seed value is reset prior to each burst and is used to calcu-
late the randomizer bit, which is combined in an exclusive XOR
with the first bit of data from each burst. The first bit of data in
a burst is the MSB of the first symbol following the last symbol
of the internally generated preamble.
PREAMBLE INSERTION BLOCK
As shown in the block diagram of the AD9853, the circuit in-
cludes a programmable preamble insertion register. This register
is 96 bits long and is transmitted upon receiving the T
X
ENABLE
signal. It is transmitted without being Reed-Solomon encoded
or scrambled. Ramp-up data, to allow for receiver synchroniza-
tion, is included as the first bits in the preamble, followed by
user burst profile or channel equalization information. The first
bit of R-S encoded and scrambled information data is timed to
immediately follow the last bit of preamble data.
For most modulation modes, a minimum preamble is required.
This minimum is one symbol, two bits for DQPSK or four bits
for either 16-QAM or D16-QAM. No preamble is required for
either FSK or QPSK.
In conformance with DAVIC/DVB standards, the preamble is
not differentially coded in DQPSK mode. However the pre-
amble data can be differentially precoded when loaded into the
preamble register. The last symbol of the preamble is used as
the reference point for the first internal differentially coded
symbol so the preamble and data will effectively be coded differ-
entially. In the D16-QAM mode, the preamble is always differ-
entially coded internally.
MODULATION ENCODER
The preamble, followed by the encoded and scrambled data is
then modulation encoded according to the selected modulation
format. The available modulation formats are FSK, QPSK,
DQPSK, 16-QAM and D16-QAM. The corresponding symbol
constellations support the interactive HFC cable specifications
called out by MCNS (DOCSIS), 802.14 and DAVIC/DVB.
The data arrives at the modulation encoder at the input bit rate
and is demultiplexed as modulation encoded symbols into sepa-
rate I and Q paths. For QPSK and DQPSK, the symbol rate is
one-half of the bit rate and each symbol is comprised of two
bits. For 16-QAM and D16-QAM, the symbol rate is one-
fourth the bit rate and each symbol is comprised of four bits. In
the FSK mode, although the 1 and 0 data is entered into the
serial data input, it effectively bypasses the encoding, scrambling
and modulation paths. The FSK data is directly routed to the
direct digital synthesizer (DDS) where it is used to switch the
DDS between two stored tuning words (F0:F1) to achieve FSK
modulation in a phase-continuous manner. By holding the input
at either 1 or 0, a single frequency continuous wave can be
output for system test or CW transmission purposes.
Differential encoding of data is frequently used to overcome
phase ambiguity error or a "false lock" condition that can be
introduced in carrier-recovery circuits used to demodulate the
signal. In straight QPSK and 16-QAM, the phase of the re-
ceived signal is compared to that of a "recovered carrier" of
known phase to demodulate the signal in a coherent manner. If
the phase of the recovered carrier is in error, then demodulation
will be in error. Differential encoding of data at the transmit end
eliminates the need for absolute phase coherency of the recov-
ered carrier at the receive end. If a coherent reference generated
by a phase lock loop experiences a phase inversion while de-
modulating in a differentially coded format, the errors would be
limited to the symbol during which the inversion occurred and
the following symbol. Differential coding uses the phase of the
"previously transmitted symbol" as a reference point to compare
to the current symbol. The change in phase from one symbol to

AD9853
≠17≠
REV. C
the next contains the message information and is used to de-
modulate the signal instead of the absolute phase of the signal.
The transmitter and receiver must use the same symbol deriva-
tion scheme.
Differential encoding in the AD9853 occurs while data still
exists as a serial data stream. When in straight QPSK or 16-QAM,
the serial data stream passes to the symbol mapper/format en-
coder stage without modification. When differential encoding is
engaged, the serial data stream is modified prior to the symbol
mapper/format stage according to Table VI. Only I1 and Q1 are
modified, even in the D16-QAM mode whose symbols are com-
posed of Q1, I1, Q0, I0. In D16-QAM, only the two MSBs of
the 4-bit symbol are modified; furthermore, the "previously
transmitted symbol" referred to in Table VI are the two MSBs
of the previous 4-bit symbol.
Symbol mapping for QPSK and DQPSK are identical. Symbol
mapping for 16-QAM and D16-QAM are slightly different (see
Figure 37) in accordance with MCNS (DOCSIS) specifications.
Special Note: For most modulation modes, a minimum pre-
amble is required. For DQPSK the minimum preamble is one
symbol (2 bits) and for either 16-QAM or D16-QAM the mini-
mum preamble is one symbol (4 bits). For FSK or QPSK, no
preamble is required.
User should be additionally aware that in the DQPSK mode,
the preamble is not differentially encoded in accordance with
MCNS (DOCSIS) specifications. If the preamble must be dif-
ferentially encoded, it can "pre-encoded" using the derivation in
Table VI. In D16-QAM, the preamble is always differentially
encoded as is the "payload" data.
When initiating a new differentially encoded transmission, the
"previously transmitted symbol" is always the last symbol of the
preamble.
PROGRAMMABLE PULSE-SHAPING FIR FILTERS
The I and Q data paths of the modulator each contain a pulse
shaping filter. Each is a 41-tap, linear phase FIR. They are used
to provide bandwidth containment and pulse shaping of the data
in order to minimize intersymbol interference. The filter coeffi-
cients are programmable, so any realizable linear phase response
characteristic may be implemented. The linear phase restriction
is due to the fact that the user may only define the center coeffi-
cient and the lower 20 coefficients. The hardware fills in the
upper 20 coefficients as a mirror image of the lower 20. This
forces a linear phase response. It should also be noted that the
pulse shaping filter upsamples the symbol rate by a factor of
four.
Normally, a square-root raised cosine (SRRC) response is desired.
In fact, the AD9853 Evaluation Board software driver implements
an SRRC response. When using the SRRC response, an excess
bandwidth factor (
) is defined that affects the low pass roll-off
characteristic of the filter (where 0
1). When
= 0, the
SRRC is an ideal low-pass filter with a "brick wall" at one-half
of the symbol rate (the Nyquist bandwidth of the data). Although
this provides maximum bandwidth containment, it has the ad-
verse affect of causing the tails of the time domain response to
be large, which increases intersymbol interference (ISI). On the
other hand, when
= 1, the SRRC yields a smooth roll-off
characteristic that significantly reduces the time domain tails,
which improves ISI. Unfortunately, the cost of this benefit is a
doubling of the bandwidth of the data signal. Values of
between
0 and 1 yield a tradeoff between excess bandwidth in the fre-
quency domain and tail suppression in the time domain.
The FIR filter coefficients for the SRRC response may be calcu-
lated using a variety of methods. One such method uses the
Inverse Fourier Transform Integral to calculate the impulse re-
sponse (time domain) from the SRRC frequency response (fre-
quency domain). An example of this method is shown in Figure
33. Of course, this method requires that the SRRC frequency
response be known beforehand.
The FIR filters in the AD9853 are implemented in hardware
using a fixed point architecture of 10-bit, twos complement
integers. Thus, each of the filter coefficients, a
i
, is an integer
such that:
≠512
a
i
511
[i = 0, 1, ... , 40]
PROGRAMMABLE INTERPOLATION FILTERS
The AD9853 employs two stages of interpolation filters in each
of the I and Q channels of the modulator. These filters are
implemented as Cascaded Integrator-Comb (CIC) filters. CIC
filters are unique in that they not only provide a low-pass fre-
quency response characteristic, but also provide the ability to
have one sampling rate at the input and another sampling rate at
the output. In general, a CIC filter may either be used as an
interpolator (low-to-high sample rate conversion) or as a
decimator (high-to-low sample rate conversion). In the case of
the AD9853, the CIC filters are configured as interpolators,
only. Furthermore, the interpolation is done in two separate
stages with each stage designed so that the rate change is pro-
grammable. The first interpolator stage offers rate change ratios
of 3 to 31, while the second stage offers rate change ratios of 2
to 63.
As stated in the previous section, the data coming out of the
FIR filters is oversampled by four. Spectral images appear at
their output (a direct result of the sampling process). These
images are replicas of the baseband spectrum which are re-
peated at intervals of four times the symbol rate (the rate at
which the FIR filters sample the data). The images are an un-
wanted byproduct of the sampling process and effectively repre-
sent a source of noise.
Normally, the output of the FIR filters would be fed directly to
the input of the I and Q modulator. This means that the spectral
images produced by the FIRs would become part of the modu-
lated signal--definitely not a desirable consequence. This is
where the CIC filters play their role. Since they have a low-pass
characteristic, they can be used to eliminate the spectral images
produced by the FIRs.
Frequency Response of the CIC Filters
The frequency response of a CIC filter is predictable. It can be
shown that the system function of a CIC filter is:
H z
z
k
k
R M
N
( )
=
-
=
-
0
1
Where N is the number of cascaded integrator (or comb) sec-
tions, R is the rate change ratio, and M is the number of unit
delays in each integrator/comb stage. For the AD9853, two of
these variables are fixed as a result of the hardware implementa-
tion; specifically, N = 4 and M = 1. As mentioned earlier, R (the
rate change ratio) is programmable.

AD9853
≠18≠
REV. C
SQUARE-ROOT RAISED COSINE (SRRC) FIR FILTER
COMPUTE AND PLOT SRRC FILTER COEFFICIENTS:
...MAP THE FILTER TAP INDEX TO TIME DOMAIN (CENTERED AT T=0)
...INVERSE FOURIER INTEGRAL COMPUTE SRRC IMPULSE RESPONSE (TIME DOMAIN) FROM
THE SRRC FREQUENCY RESPONSE (FREQUENCY DOMAIN). THE COS() FUNCTION REPLACES
THE NORMAL COMPLEX EXPONENTIAL BECAUSE WE ARE RESTRICTED TO REAL
FILTER COEFFICIENTS.
...SRRC FILTER COEFFICIENTS INTEGERIZED AND SCALED
...FIR FILTER
COEFFICIENTS
COMPUTE AND PLOT SRRC FREQUENCY RESPONSE:
...DEFINE NUMBER OF FREQUENCY POINTS AND FREQUENCY STEP SIZE (FOR PLOTTING PURPOSES)
...CREATE VECTOR OF UNIFORMLY SPACED FREQUENCY POINTS {fmax = 0.5; A REQUIREMENT OF THE GAIN() FUNCTION},
...NORMALIZED FREQUENCY RESPONSE
...EXCESS BANDWIDTH FACTOR FOR SRRC FREQUENCY RESPONSE
...BANDWIDTH OF SRRC FILTER (RELATIVE TO SYMBOL RATE)
...PROCESSING GAIN OF CIC FILTERS (USED TO CORRELATE RESULTS WITH AD9853 EVAL. BD.)
...SETS MAX VALUE OF SRRC FILTER BASED ON FINITE WORD SIZE
...NUMBER OF FIR PULSE SHAPING FILTER TAPS
...UPSAMPLING RATIO OF FIR PULSE SHAPING FILTER (RELATIVE TO THE SYMBOL RATE)
...RETURNS 1 IF a <= x <= b, 0 OTHERWISE
...RETURNS NEAREST INTEGER TO x
...RATIO TO DECIBEL CONVERSION FUNCTION
...SRRC FREQUENCY RESPONSE FUNCTION
(f IS RELATIVE TO THE SYMBOL RATE)
500
0
10
5
0
15
20
25
30
35
40
h
tap
TAP
SRRC IMPULSE RESPONSE
FREQUENCY SCALE ≠ fn
H
n
≠ dB
0
0
≠20
≠40
≠60
0.2
0.4
0.6
0.8
1.0
1.2
1.4
1.6
1.8
2.0
FREQUENCY SCALED TO SYMBOL RATE
SRRC NORMALIZED FREQUENCY RESPONSE
0
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
hT =
0
0
3
2
≠2
≠5
≠2
5
7
1
≠7
≠7
7
19
7
≠34 ≠71 ≠48
71
260 438 511
tap := 0..TAPS ≠ 1 t
tap
:=
1
FreqScale
tap ≠
TAPS ≠ 1
2
.
BW
0
h(t) :=
htap := h(ttap) h := INT
h SCALEPROC GAIN
max(h)
.
0.5
freq_pts ≠ 1
f :=
freq_pts := 250
n := 0..freq_pts ≠ 1
fn := f n
.
K := (| gain(h,0) |)
≠1
Hn := K | gain (h,fn) |
.
GLOBAL DECLARATIONS
CONSTANTS:
0.5
PROC_GAIN
1
BW
0.5 (1 + )
.
SCALE
511
TAPS
41
FreqScale
4
FUNCTIONS:
InRange (x,a,b)
(x a) . (x b)
INT(x) floor (x + 0.5)
dB(x) if (| x | = 0, 200, 20 log (| x |))
.
SRRC(f) passband 0.5 (1 ≠ )
.
stopband 0.5 (1 + )
if InRange (f, 0, stopband)
1 if InRange (f, 0, passband)
cos
4
.
.
.
(2 f + ≠ 1) if InRange (f, passband, stopband)
0 otherwise
SRRC(f) cos(2
f t)df
.
.
.
.
Figure 33. Mathcad Simulation of a 41-Tap SRRC Filter

AD9853
≠19≠
REV. C
The frequency response, H(f), of a CIC filter is found by evalu-
ating H(z) at z = e
j(2
f/R)
:
H f
e
j
f R k
k
R M
N
( )
/
=
-
(
)
=
-
2
0
1
where f is relative to the input sample rate of the CIC filter.
With this formula, we can accurately predict the frequency
response of the CIC filters.
Compensating for CIC Roll-Off
As discussed previously, the CIC filters offer a low-pass charac-
teristic that can be used to eliminate the spectral images pro-
duced by the FIR filters. Unfortunately, the CIC response is not
flat over the frequency range of the baseband signal. Thus, the
inherent attenuation (or roll-off) of the CIC filters distorts the
baseband data signal. So even though the CIC filters help to
eliminate the images described earlier, they introduce another
form of error to the baseband signal--frequency-dependent
amplitude distortion. This ultimately manifests itself as a higher
level of Error Vector Magnitude (EVM) at the output of the
I and Q modulator. Also, the larger the bandwidth of the
baseband signal, the more pronounced the CIC roll-off, the
greater the amplitude distortion and the worse the EVM perfor-
mance. This is a serious problem because if a value of
=1 is
used for the SRRC response of the FIR filters, a doubling of the
bandwidth of the baseband signal results and hence, a degrada-
tion in EVM performance.
Fortunately, there is a way to compensate for the effects of CIC
roll-off. Since the frequency response of the CIC filters is pre-
dictable, it is possible to compensate for the CIC roll-off charac-
teristic by adjusting the response of the FIR filters accordingly.
The adjustment is accomplished by modifying the FIR filter
response with a response that is the inverse of that of the CIC
filters. This is done by precompensating the FIR filters.
To perform CIC compensation, we simply define a function
(H
COMP
) that has a response which is the inverse of the CIC
response. Specifically,
H
f
H f
COMP
( )
=
( )
1
By multiplying the original FIR filter frequency response by
H
COMP
, we obtain the necessary compensation.
Unfortunately, it's not quite this simple. Recall that the coeffi-
cients of the baseband filter were computed using an inverse
Fourier transform integral which included the SRRC function.
In order to compensate for the CIC filter response, the SRRC
function must be multiplied by the H
COMP
function. But the
frequency scale of the SRRC response is computed based on
frequencies relative to the symbol rate, while the H
COMP
func-
tion is computed relative to the input sampling rate of the CIC
filter. The input CIC sampling rate happens to be the same as
the sample rate of the FIR filter (see Figure 36), or four times
the symbol rate. Thus, we have a frequency scaling problem.
This problem is easily corrected by introducing a frequency
scaling factor (FreqScale = 4) into the H
COMP
function so that
the frequency scales of the two functions match. Thus, the
actual H
COMP
function required is given by:
H
H
f
FreqScale
COMP
=
1
It should be noted that in compensating for the CIC roll-off,
only the first stage CIC filter need be considered. This is due to
the fact that at the output of the first stage CIC filter the
bandwidth of the signal is reduced to the point that the roll-off
introduced by the second stage is negligible in the region of the
baseband signal.
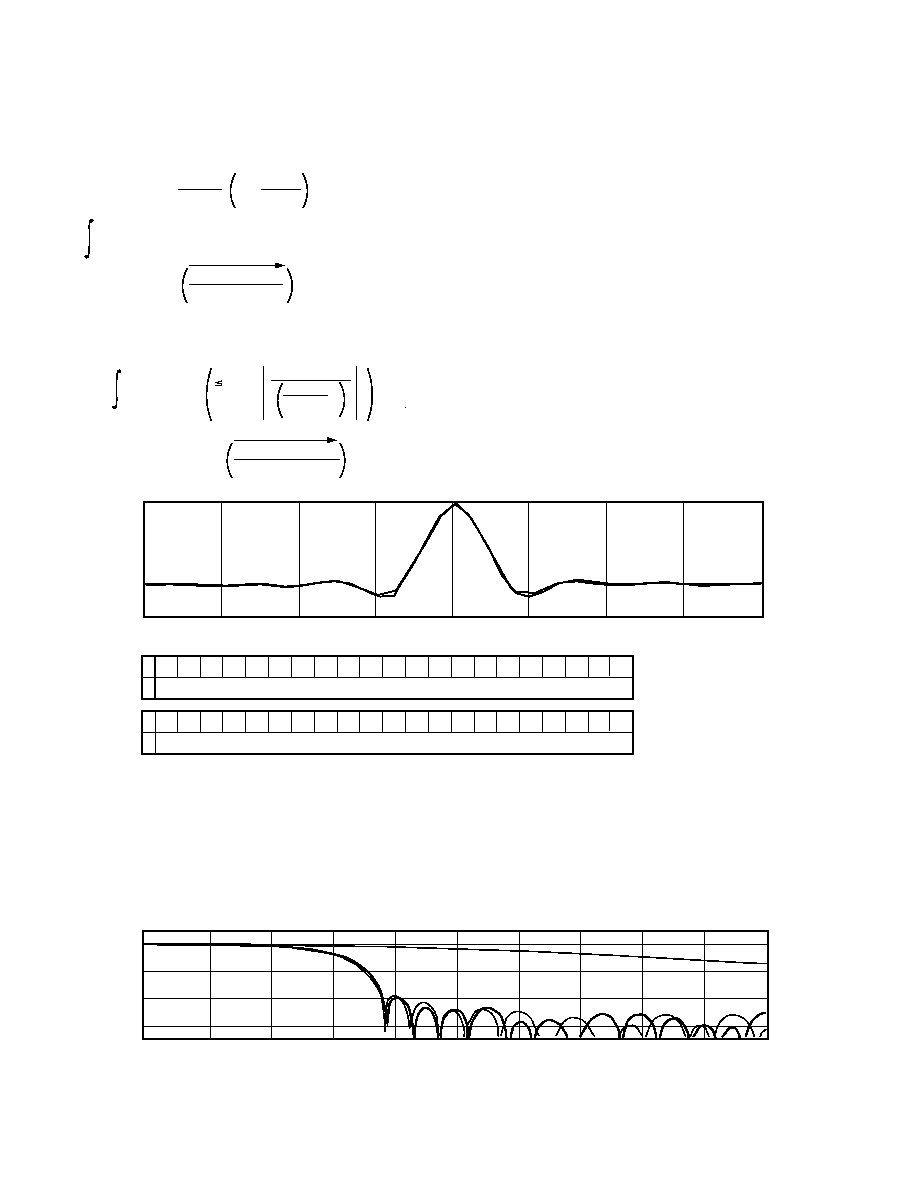
The CIC compensation method is demonstrated by example
(using MathCad) in Figures 34 and 35. An interpolation rate
(R) of 6 is used in the example. The improvement obtained by
compensating for the CIC response is graphically demonstrated
in Figure 35 which shows:
∑ the SRRC filter response (which is the desired overall response)
∑ the composite response of the SRRC in series with the CIC
filter (distorted response)
∑ the composite response of the compensated SRRC in series
with the CIC (corrected response)
Note that the ideal SRRC response and the compensated com-
posite response are virtually identical in the region of the pass-
band. Thus, the goal of correcting for the CIC filter response
has been accomplished.
There is one subtlety to be noted in the example. The CIC
compensation is only applied to the first 90% of the bandwidth
of the baseband signal (note the variable inside the integral).
It was found that compensation over the full 100% of the band-
width produced a reduction in the suppression of signals in the
stopband region of the SRRC. This resulted in creating more
distortion than by not correcting for the CIC roll-off in the first
place. However, by slightly reducing the bandwidth over which
correction is applied, the stopband suppression is once again
restored and a significant improvement in EVM performance is
obtained.
Determining the Necessary Interpolator Rate Change Ratio
The AD9853 contains three stages of digital interpolation:
1) Fixed 4
◊
Pulse Shaping FIR Filter.
2) Programmable 3 to 31 First Interpolation Filter.
3) Programmable 2 to 63 Second Interpolation Filter.
After the serial input data stream has been encoded into QPSK
or 16-QAM symbols, the symbol interpolation rate of the AD9853
is determined by the product of the three interpolating stages
listed above. In QPSK mode, the minimum symbol interpolation
rate that will work is 4
◊
3
◊
2 = 24; for 16-QAM the minimum
is 4
◊
4
◊
3 = 48. The maximum symbol interpolation rate is
4
◊
31
◊
63 = 7812. The symbol rate at the encoder output for
QPSK is equal to 1/2 the bit rate of the data and for 16-QAM it
is 1/4 the bit rate. Figure 36 is a partial block diagram of the
AD9853 and follows the path of the data stream from the input
of the I and Q encoder block to the output of the DAC.
AD9853
≠20≠
REV. C
cos(2
f t)df
.
.
.
.
BW
0
h1(t) :=
R := 6
f BW,
.
SRRC (f) if
.
H(0,R)
H
f
FreqScale
,R
,1
MODIFICATION OF SQUARE-ROOT RAISED COSINE (SRRC) FIR FILTER RESPONSE
TO COMPENSATE FOR CASCADED INTEGRATOR-COMB (CIC) FILTER RESPONSE
COMPUTE SRRC FILTER COEFFICIENTS:
...MAP THE FILTER TAP INDEX TO TIME DOMAIN (CENTERED AT t = 0)
...INVERSE FOURIER INTEGRAL COMPUTES SRRC IMPULSE RESPONSE
(TIME DOMAIN) FROM THE SRRC FREQUENCY RESPONSE (FREQUENCY DOMAIN).
THE COS() FUNCTION REPLACES THE NORMAL COMPLEX EXPONENTIAL
BECAUSE WE ARE RESTICTED TO REAL FILTER COEFFICIENTS.
...SRRC FILTER COEFFICIENTS INTEGERIZED AND SCALED
COMPUTE SRRC FILTER COEFFICIENTS MODIFIED
FOR CORRECTION OF CIC RESPONSE:
...CIC INTERPOLATION RATIO (USER PROGRAMMABLE)
...INVERSE FOURIER INTERGRAL MODIFIES THE SRRC RESPONSE
BY THE RECIPROCAL OF THE NORMALIZED CIC FREQUENCY
RESPONSE. THE MODIFICATION IS ONLY PERFORMED OVER THE
FRACTION OF THE SRRC BANDWIDTH AS SPECIFIED BY .
...MODIFIED SRRC FILTER COEFFICIENTS INTEGERIZED AND SCALED TO 10-BIT RANGE
SRRC AND MODIFIED SRRC IMPULSE RESPONSE
...FIR FILTER COEFFICIENTS
FOR SRRC RESPONSE
...FIR FILTER COEFFICIENTS
FOR SRRC RESPONSE
WITH CIC COMPENSATION
DISPLAY FREQUENCY RESPONSE PLOTS:
f:= 0,0.001.. 0.5
...NORMALIZED FREQUENCY RANGE [A REQUIREMENT OF MATHCAD'S GAIN() FUNCTION]
...SCALE FACTORS TO ADJUST SRRC,
COMPENSATED SRRC, AND CIC
FREQUENCY RESPONSES TO UNITY AT f = 0
...FUNCTION TO COMPUTE NORMALIZED, UNCOMPENSATED FIR RESPONSE (SRRC) IN dB
...FUNCTION TO COMPUTE NORMALIZED CIC RESPONSE IN dB
...FUNCTION TO COMPUTE NORMALIZED, COMPENSATED FIR RESPONSE (SRRC + CIC
≠1
) IN dB
...FUNCTION TO COMPUTE OVERALL SYSTEM RESPONSE OF SRRC AND CIC TOGETHER IN dB
...FUNCTION TO COMPUTE OVERALL SYSTEM RESPONSE OF COMPENSATED SRRC AND CIC TOGETHER
SRRC, CIC, AND CORRECTED SRRC RESPONSE
10
5
0
15
20
25
30
35
40
TAP
500
0
h
tap
h1
tap
FREQUENCY SCALE ≠ fn
0
0
≠20
≠40
≠60
0.2
0.4
0.6
0.8
1.0
1.2
1.4
1.6
1.8
2.0
FIR(f)
CIC(f)
COMP(f)
0
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
0
0
3
2
≠2
≠5
≠2
5
7
1
≠7
≠7
7
19
7
≠34 ≠71 ≠48
71
260 438 511
hT =
h1T =
0
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
0
1
4
2
≠3
≠6
≠1
7
9
1
≠10 ≠9
8
24
12
≠34 ≠78 ≠61
56
251 435 511
tap := 0..TAPS ≠ 1 t
tap
:=
1
FreqScale
tap ≠
TAPS ≠ 1
2
.
BW
0
h(t) :=
SRRC(f) cos(2
f t)df
.
.
.
.
htap := h(ttap) h := INT
h PROC_GAINSCALE
max(h)
.
SCALEsrrc := (| gain(h,0) |)
≠1
h1tap := h1(ttap)
h1 := INT
h1 PROC_GAINSCALE
max(h1)
.
SCALEcompsrrc := (| gain(h1,0) |)
≠1
SCALEcic := (| H(0,R) |)
≠1
SCALEsrrc := 5.559 10
≠4
.
SCALEcompsrrc := 5.79 10
≠4
.
SCALEcic := 7.716 10
≠4
.
FIR(f) := dB(SCALEsrrc | gain(h,f) |)
.
CIC(f) := dB(SCALEcic | H(f,R) |)
.
COMP(f) := dB(SCALEcompsrrc | gain(h1,f) |)
.
SYSuncomp(f) := FIR(f) + CIC(f)
SYScomp(f) := COMP(f) + CIC(f)
Figure 34. Mathcad Simulation of 41-Tap SRRC Filter with CIC Compensation

AD9853
≠21≠
REV. C
FREQUENCY SCALE ≠ f
FREQUENCY SCALED TO SYMBOL RATE
2
0
≠10
≠22
≠34
0.1
0.2
0.3
0.4
0.5
0.6
0.7
PASSBAND DETAIL
FREQUENCY SCALE ≠ f
FREQUENCY SCALED TO SYMBOL RATE
0
0
≠20
≠40
≠60
0.2
0.4
0.6
0.8
1.0
1.2
1.4
1.6
1.8
2.0
FIR(f)
SYSuncomp(f)
SYScomp(f)
RESPONSE OF NORMAL SRRC, NORMAL SRRC + CIC, AND COMPENSATED SRRC + CIC
FIR(f)
SYSuncomp(f)
SYScomp(f)
...EXCESS BANDWIDTH FACTOR FOR SRRC FREQUENCY RESPONSE
...PORTION OF SRRC BANDWIDTH OVER WHICH APPLY CIC CORRECTION (0< <= 1)
...BANDWIDTH OF SRRC FILTER (RELATIVE TO SYMBOLRATE)
...NUMBER OF FIR PULSE SHAPING FILTER TAPS
...SETS MAX VALUE OF FIR PULSE SHAPING FILTER BASED ON FINITE WORD SIZE
...UPSAMPLING RATIO OF FIR PULSE SHAPING FILTER (RELATIVE TO THE SYMBOL RATE)
...PROCESSING GAIN OF CIC FILTERS (USED TO CORRELATE RESULTS WITH AD9853 EVAL. BD.)
...NUMBER OF COMB/INTEGRATOR STAGES IN CIC FILTER
...UNIT DELAYS PER STAGE OF CIC FILTER
...RETURNS 1 IF a<= x <= b, 0 OTHERWISE
...RETURNS NEAREST INTEGER TO x
...RATIO TO DECIBEL CONVERSION FUNCTION
...SRRC FREQUENCY RESPONSE FUNCTION
(f IS RELATIVE TO THE SYMBOL RATE)
...Z TRANSFORM
...CIC FILTER TIME INDEX FREQUENCY RESPONSE FUNCTION
≠k
f
R
z
H(f,R)
R M ≠ 1
.
k = 0
N
GLOBAL DECLARATIONS
CONSTANTS:
0.5
PROC_GAIN
1
BW
0.5 (1+ )
.
SCALE
511
TAPS
41
FreqScale
4
FUNCTIONS:
InRange (x,a,b)
(x a) . (x b)
INT(x) floor(x + 0.5)
dB(x) if (| x | = 0, ≠200, 20 log (| x |))
.
.
.
SRRC(f) passband 0.5 (1 ≠ )
stopband 0.5 (1 + )
1 if InRange (f, 0, stopband)
if InRange (f, 0, passband)
cos
4
.
.
.
(2 f + ≠ 1) if InRange (f, passband, stopband)
0 otherwise
0.9
N
4
M
1
z(f)
e
2
j
f
. .
Figure 35. MathCad Simulation (Continued)

AD9853
≠22≠
REV. C
The goal of interpolation is to up-sample the baseband informa-
tion to the system clock rate and to suppress aliases in the pass-
band. The system clock rate is the sample rate of the sine and
cosine signal carriers generated by the DDS in the quadrature
modulator stage. Alias suppression is accomplished by the CIC
filters as described previously. For timing synchronization, the
overall interpolation rate must be set such that the bit rate of the
baseband signal be an even integer factor of the system clock
rate. The importance of the relationship between the data and
system clock rates can not be overstressed. It is restated here for
clarity:
The SYSTEM CLOCK RATE must be an EVEN INTEGER
MULTIPLE of the DATA BIT RATE.
Following is a design example that demonstrates the principles
outlined above.
System Requirements:
∑ Baseband Bit Rate
1.024 Mb/s
∑ Carrier Frequency
49 MHz
∑ Modulation Scheme
16-QAM
∑ System Power
3.3 V
It should be noted that with a 3.3 V power supply, the maxi-
mum system clock rate of the AD9853 is 126 MHz. This sets an
upper bound on the system clock.
The first consideration is to make sure that the required carrier
frequency is within the AD9853's output frequency range. The
carrier frequency should be
40% of the system clock rate. The
given carrier frequency requirement of 49 MHz means that a
minimum system clock rate of 122.5 MHz is required; a value
within the range of the AD9853's 126 MHz capability.
We must next ensure that the system clock rate is an even inte-
ger multiple of the input bit rate. Dividing the system clock rate
(122.5 MHz) by the data rate (1.024 Mbps) yields 119.63.
Obviously this is not an integer, so we must select the nearest
even integer value (in this case, 120) as the data rate multiplier.
Thus, a system clock rate of 122.88 MHz is required (120
◊
1.024 Mbps). With 6
◊
REFCLK engaged, the reference clock
input will be 1/6th of the system clock rate, or 20.48 MHz.
Finally, the two interpolator rates must be determined. Since
the FIR filter and interpolator stages will be operating on 16-QAM
symbols, the data rate must be converted from bits/second to
symbols/second (baud). Each 16-QAM symbol is composed
of four serial data bits. Therefore, the baud rate at the input to
the FIR filter is 1.024 Mbps/4 = 256k baud. The FIR pulse
shaping filters up-sample by a factor of 4. This fixes the FIR
sample clock at 256k baud
◊
4, or 1.024 MSPS. With the FIR
sampling at a 1.024 MSPS rate, and a previously determined
system clock rate of 122.88 MHz, the interpolators must up-
sample by a factor of 120 (122.88/1.024 = 120).
Rule of Thumb: divide the interpolating burden as equally as
possible among the two interpolators.
Since the required rate change ratio is 120, select a value of 10
for interpolator #1 and 12 for interpolator #2 (10
◊
12 = 120).
This satisfies the requirements for the two programmable inter-
polator stages.
Thus far we have established the rate change ratios for the inter-
polators. However, there is an additional consideration. By
default, the interpolators have an intrinsic gain (or loss) that is
dependent on the selected interpolation rate. Since there is the
potential to have overall CIC gains of greater than unity, care
must be taken to avoid the occurrence of overflow in the
interpolators.
Interpolator Scaling
Proper signal processing in the AD9853 depends on data propa-
gating through the pulse-shaping filter and interpolator stages
with as flat a baseband response as possible. In addition to the
frequency response issue, it is also necessary to ensure that the
numerical data propagating through the interpolators does not
result in an overflow condition.
As mentioned earlier, the interpolators are implemented using a
CIC filter. In the AD9853, the CIC filter is designed using
fixed-point processing and two cascaded CIC filter sections
(Interpolator #1 and Interpolator #2). It is important to under-
stand that in a CIC filter, the integration portion of the circuit
will require the accumulation of values based on the rate change
factor, R. This means that the size of the data word grows in a
manner dependent on the choice of R. In the case of Interpola-
tor #1, the circuit is designed around a maximum R of 32 and
this results in an output register width of 28 bits. The design of
Interpolator #2 requires an output register width of 25 bits.
I & Q
ENCODER
I
Q
3
SYMBOL
CLOCK
4
41 - TAP
FIR
12
41 - TAP
FIR
12
MUX
2
2
13
INTER-
POLATOR
#1
SCALER
28
13
INTER-
POLATOR
#2
SCALER
25
10
SYSTEM
CLOCK
M = 3...31
N = 2...63
13
28
13
25
10
SCALER
INTER-
POLATOR
#2
SCALER
INTER-
POLATOR
#1
MUX
10
20
DDS
INVERSE
SINC
FILTER
DAC
20
10
1
3
SIN(
C
)
COS(
C
)
10
M
N
Figure 36. Block Diagram of AD9853 Data Path and Clock Stages

AD9853
≠23≠
REV. C
These register widths have been chosen to accommodate the
highest values of R for each interpolator. When values of R are
chosen that are less than the maximum value, then data will
accumulate only in the lesser significant bits of the output regis-
ter. This is an important point to consider since only 13 bits of
28 are passed on from Interpolator #1 to Interpolator #2, and
only 10 bits of 25 are passed on from Interpolator #2 to the
I and Q modulator (see Figure 36). If only the most significant
bits were to be passed on, then low R values would result in
most (possibly all) of the bits being 0s because data would have
accumulated only in the less significant bits of the output regis-
ter. Obviously, it is necessary to have a mechanism that allows
one to select which group of bits to pass on to the next stage in
order to prevent the loss of data by truncation.
In the AD9853 this mechanism is handled by means of the
Interpolator #1 and #2 Scaling Registers (control bus addresses
14h and 15h). The scaling word written into each register selects
a group of bits at the output of the appropriate interpolator. In
the case of Interpolator #1 this is a 13-bit group, while in the
case of Interpolator #2 it is a 10-bit group. Inspection of the
scaling registers indicates that Interpolator #1 uses a 5-bit scaling
word while Interpolator #2 uses a 6-bit scaling word.
At first inspection it would seem as though there are 32 and 64
scaling steps for Interpolator #1 and #2, respectively. This is
not the case, however. The scaling word is actually decoded in a
nonlinear manner and there is considerable overlap; i.e., several
different register values may actually select the same group of
bits at the interpolator output. Table III lists the relationship
between the scaling word value and the highest bit of the inter-
polator output register which becomes the most significant bit
(MSB) of the group selected.
Table III. Interpolator Scale Bit Selection
Interpolator #1
Interpolator #2
Highest Bit
Highest Bit
Scaling
Selected
Scaling
Selected
Register
from
Register
from
Value
Output
Value
Output
(Decimal)
Register
(Decimal)
Register
0
12
0
12
1
15
1
14
2
16
2
15
3≠4
18
3≠4
16
5
19
5≠6
17
6
20
7≠10
18
7≠9
21
11≠14
19
10≠11
22
15≠21
20
12≠14
23
22≠30
21
15≠19
24
31≠44
22
20≠24
25
45≠62
23
25≠30
26
63
24
31
27
Selection of the proper scaling value is dependent on the selec-
tion of R for the interpolator. It is desirable to choose a scale
value that ensures that the MSB of the selected group of bits
coincides with the highest useful bit in the output register. To
accomplish this condition, use the following rule:
Scaling Rule: For a particular interpolator, choose a nominal
Scaling Register value that is ONE LESS than the interpolation
rate (R) for the same interpolator.
For example, if Interpolator #1 is set for an interpolation rate of
6, then choose a Scaling Register value of 5 for Interpolator #1.
It has already been mentioned that the required number of bits
at the output of the CIC filter is a function of R. It turns out
that for values of R that are a power of 2, the number of bits
required to handle the growth of the output register is an inte-
ger. This results in a processing gain of unity for the CIC filter.
For values of R that are not a power of 2, the required number
of output bits is not an integer. This results in a processing gain
that is not unity. Tables IV and V detail the relationship be-
tween the Scaling Register values and the processing gain for
Interpolator #1 and Interpolator #2. Note that certain Scale
Register values for a particular R yield a processing gain greater
than unity. Thus, it is possible that the nominal Scaling Register
values will result in a total CIC processing gain of > 1.
WARNING: It is of utmost importance the user make certain
that the total processing gain of the data path be
1.
That is, the product of the FIR gain, Interpolator #1 gain, and
Interpolator #2 gain must be
1. This is because total process-
ing gains of > 1 may result in an overflow condition within the
CIC filters, which puts the hardware in a nonrecoverable state
(short of resetting the device). The contents of Tables IV and V
offer the user some flexibility in the choice of processing gains
for a particular interpolation rate. For example, let us assume
that an overall interpolation rate of 25 is required. A value of
R = 5 for both interpolators satisfies this requirement, which
leads to a Scale Register value of 4 for each interpolator. Note,
however, that under these conditions the processing gain for the
CIC filters alone is 3.053 (1.953
◊
1.563).
There are two ways in which we can handle this situation. The
first is to scale the coefficients of the FIR filter by 0.3275 (1/3.053),
which reduces the total processing gain to 1. The disadvantage
here is that the FIR coefficients are 10-bit signed integers and
scaling by 0.3275 may result in an unacceptable level of trunca-
tion caused by the finite resolution. The second method makes
use of Tables IV and V. We can choose the Alternate Scale
Value of 5 (instead of 4) for Interpolator #2. This results in a
processing gain of 1.525 (1.953
◊
0.781). We can now scale the
FIR coefficients by a more modest value of 0.6557 (1/1.525)
and net an overall gain of unity through the three stages. Of
course, we could just as easily have chosen the Alternate Scale
Value for Interpolator #1 and modified the FIR coefficients
accordingly. Typically, the choice of interpolator scale values
that results in an overall gain closest to (but not less than) one is
selected. Then the FIR coefficients are scaled downward to
yield unity gain.

AD9853
≠24≠
REV. C
Table IV. Interpolator #1
Rate
Nominal
Change
Scale
Alternate
Factor
Value
Nominal
Scale
Resulting
(R)
(R-1)
Gain
Value
Gain
03
02
1.688
03
0.844
04
03
1.000
05
0.500
05
04
1.953
05
0.977
06
05
1.688
06
0.844
07
06
1.340
07
0.670
08
07
1.000
10
0.500
09
08
1.424
10
0.712
10
09
1.953
10
0.977
11
10
1.300
12
0.650
12
11
1.688
12
0.844
13
12
1.073
15
0.536
14
13
1.340
15
0.670
15
14
1.648
15
0.824
16
15
1.000
20
0.500
17
16
1.199
20
0.600
18
17
1.424
20
0.712
19
18
1.675
20
0.837
20
19
1.953
20
0.977
21
20
1.130
25
0.565
22
21
1.300
25
0.650
23
22
1.485
25
0.743
24
23
1.688
25
0.844
25
24
1.907
25
0.954
26
25
1.073
31
0.536
27
26
1.201
31
0.601
28
27
1.340
31
0.670
29
28
1.489
31
0.744
30
29
1.648
31
0.824
31
30
1.818
31
0.909
Table V. Interpolator #2
Rate
Nominal
Change
Scale
Alternate
Factor
Value
Nominal
Scale
Resulting
(R)
(R-1)
Gain
Value
Gain
02
01
1.000
02
0.500
03
02
1.125
03
0.563
04
03
1.000
05
0.500
05
04
1.563
05
0.781
06
05
1.125
07
0.563
07
06
1.531
07
0.766
08
07
1.000
11
0.500
09
08
1.266
11
0.633
10
09
1.563
11
0.781
11
10
1.891
11
0.945
12
11
1.125
15
0.563
13
12
1.320
15
0.660
14
13
1.531
15
0.766
15
14
1.758
15
0.879
16
15
1.000
22
0.500
17
16
1.129
22
0.564
18
17
1.266
22
0.633
19
18
1.410
22
0.705
20
19
1.563
22
0.781
21
20
1.723
22
0.861
22
21
1.891
22
0.945
23
22
1.033
31
0.517
24
23
1.125
31
0.563
25
24
1.221
31
0.610
26
25
1.320
31
0.660
27
26
1.424
31
0.712
28
27
1.531
31
0.766
29
28
1.643
31
0.821
30
29
1.758
31
0.879
31
30
1.877
31
0.938
32
31
1.000
45
0.500
33
32
1.063
45
0.532
34
33
1.129
45
0.564
35
34
1.196
45
0.598
36
35
1.266
45
0.633
37
36
1.337
45
0.668
38
37
1.410
45
0.705
39
38
1.485
45
0.743
40
39
1.563
45
0.781
41
40
1.642
45
0.821
42
41
1.723
45
0.861
43
42
1.806
45
0.903
44
43
1.891
45
0.945
45
44
1.978
45
0.989
46
45
1.033
63
0.517
47
46
1.079
63
0.539
48
47
1.125
63
0.563
49
48
1.172
63
0.586
50
49
1.221
63
0.610
51
50
1.270
63
0.635
52
51
1.320
63
0.660
53
52
1.372
63
0.686
54
53
1.424
63
0.712
55
54
1.477
63
0.739
56
55
1.531
63
0.766
57
56
1.586
63
0.793
58
57
1.643
63
0.821
59
58
1.700
63
0.850
60
59
1.758
63
0.879
61
60
1.817
63
0.908
62
61
1.877
63
0.938
63
62
1.938
63
0.969
AD9853
≠25≠
REV. C
10
(01)
00
(00)
01
(10)
11
(11)
Q
I
a. QPSK Symbol Mapping
1011
(0111)
1010
(0101)
1000
(0100)
1001
(0110)
Q
I
0001
(0010)
0011
(0011)
0010
(0001)
0000
(0000)
0100
(1000)
0101
(1010)
0111
(1011)
0110
(1001)
1110
(1101)
1100
(1100)
1101
(1110)
1111
(1111)
b. D16-QAM Symbol Mapping
1011
(0111)
1001
(0110)
1000
(0100)
1010
(0101)
Q
I
0001
(0010)
0011
(0011)
0010
(0001)
0000
(0000)
0100
(1000)
0110
(1001)
0111
(1011)
0101
(1010)
1110
(1101)
1100
(1100)
1101
(1110)
1111
(1111)
c. 16-QAM Gray-Coded Symbol Mapping
Figure 37. Symbol Mapping for QPSK, 16-QAM, and DQAM,
Spectrum = I
◊
COS + Q
◊
SIN (Spectrum = I
◊
COS ≠ Q
◊
SIN)
MIXERS, ADDER, INVERSE SINC FUNCTIONS
At the output of the Interpolation filters, the pulse-shaped, up-
sampled I and Q baseband data is multiplied with digitized
quadrature versions of the carrier, cos(
C
t) and sin(
C
t) respec-
tively, which are provided by a direct digital synthesizer (DDS)
block. The DDS block has a 32-bit tuning word that results in
an extremely fine frequency tuning resolution of f
CLOCK
/2
n
, as
well as extremely fast output frequency switching. The multiplier
outputs are then summed to form the QPSK/QAM-modulated
signal. This signal is then filtered by an inverse sinc filter to
compensate for the SINx/x roll-off function inherent in the
digital-to-analog conversion process. The inverse sinc filter
flattens the gain response across the Nyquist bandwidth. This is
most critical for higher data rate signals that are placed on carri-
ers at the high end of the spectrum where the uncompensated
SINx/x roll-off would be getting progressively steeper. Gain
attenuation across a channel will result in modulation quality
impairments, such as degraded error vector magnitude (EVM).
The spectral inversion bit, when enabled, inverts the Q data at the
input to the adder circuit in the quadrature amplitude modulator
section. This has the effect of reversing the direction of the phase
rotation around the constellation map. Positive phase rotation
on the I/Q constellation plane corresponds to counterclockwise
movement. For example, the symbols in parentheses on the
QPSK constellation in Figure 37 corresponds to a spectral
mapping of I
◊
COS ≠ Q
◊
SIN. The phase rotation from symbol
value 11 to 01 is a positive 90 degree rotation. Traversing
around the constellation in a positive direction, there are also
positive 90 degree rotations from 01 to 00, 00 to 10, and 10
back to 11. If the spectral invert bit is disabled, providing the
spectral map I
◊
COS + Q
◊
SIN as shown in Figure 37, a phase
rotation from symbol value 11 to 01 now corresponds to a nega-
tive 90 degrees of phase rotation. Similarly, there are now nega-
tive 90 degree phase rotations from 01 to 00, 00 to 10 and 10
back to 11. In other words, the direction of phase rotation

AD9853
≠26≠
REV. C
around the constellation has simply been reversed. This effect
also holds true for the 16-QAM and D16-QAM constellations
shown in the respective I
◊
COS ≠ Q
◊
SIN and I
◊
COS + Q
◊
SIN mappings shown in Figure 37.
DIRECT DIGITAL SYNTHESIZER FUNCTION
The direct digital synthesizer (DDS) block delivers the sine/cosine
carriers that are digitally modulated by the I/Q data paths. The
DDS function is frequency tuned via the control bus with a
32-bit tuning word. This allows the AD9853's output carrier
frequency to be very precisely tuned while still providing output
frequency agility.
The equation relating output frequency of the AD9853 digital
modulator to the frequency tuning word (FTWORD) and the
reference clock (REFCLK) is given as:
f
OUT
= (FTWORD
◊
REFCLK)/2
32
where: f
OUT
and REFCLK frequencies are in Hz and FTWORD
is a decimal number from 0 to (2
32
)/2
Example: Find the FTWORD for f
OUT
= 41 MHz and REFCLK
= 122.88 MHz
If f
OUT
= 41 MHz and REFCLK = 122.88 MHz, then:
FTWORD = 556AAAAA hex
Loading 556AAAAAh into control bus registers 16h≠19h programs
the AD9853 for f
OUT
= 41 MHz, given a REFCLK frequency of
122.88 MHz.
D/A CONVERTER
Up to this point all the processing has been in the digital domain.
In order to pass the modulated signal onto the cable driver for
amplification to the levels required to drive the 75 ohm cable, a
digital-to-analog converter (DAC) is implemented. The DAC
needs to have good enough transient characteristics so as not to
add significant spurious in the spectrum. Typically the worst
spurs from the DAC are due to harmonics of the fundamental
signal and their aliases (please see the AD9850 complete-DDS
data sheet for a detailed explanation of aliased images). These
harmonics are worst case for the higher carrier frequencies. The
AD9853 contains a wideband 10-bit DAC which maintains
spurious-free dynamic range (SFDR) performance of ≠50 dBc
up to 42 MHz A
OUT
and ≠44 dBc up to 65 MHz A
OUT
.
The conversion process will produce aliased components at the
DAC output at n
◊
f
CLOCK
±
f
CARRIER
(n = 1, 2, 3, ...). These
are typically filtered with an external RLC filter between the
DAC and the line driver amplifier. Again, it is important for this
analog filter to have a sufficiently flat gain and linear phase
response across the bandwidth of interest so as to avoid the
aforementioned modulation impairments. A relatively inexpen-
sive seventh order elliptical low-pass filter is sufficient to sup-
press the aliased components for HFC network applications.
The AD9853 provides true and complement outputs, Pins 24
and 25, which are current outputs. The full-scale output current
is set by the R
SET
resistor at Pin 18. The value of R
SET
for a
particular I
OUT
is determined using the following equation:
R
SET
= 32 (1.248 V/I
OUT
)
For example, if a full-scale output current of 20 mA is desired,
then R
SET
= 32(1.248/0.02), or approximately 2 k
. Every
doubling of the R
SET
value will halve the output current. Maxi-
mum output current is specified as 20 mA.
The full-scale output current range of the AD9853 is 5 mA≠20 mA,
with 10 mA being the optimal value for best spurious-free
dynamic range (SFDR). Full-scale output currents outside of
this range will degrade SFDR performance. SFDR is also slightly
affected by output matching, that is, for best SFDR, the two
outputs should be equally terminated.
The output load should be located as close as possible to the
AD9853 package to minimize stray capacitance and inductance.
The load may be a simple resistor to ground, an op amp cur-
rent-to-voltage converter, or a transformer-coupled circuit. It is
best not to attempt to directly drive highly reactive loads (such
as an LC filter). Driving an LC filter without a transformer
requires that the filter be doubly terminated for best performance,
that is, the filter input and output should both be resistively
terminated with the appropriate values. The parallel combina-
tion of the two terminations will determine the load that the
AD9853 will see for signals within the filter passband. For ex-
ample, a 50
terminated input/output low-pass filter will look
like a 25
load to the AD9853. The resistor at the filter input
will mask the reactive components of the LC filter and provide a
termination for signals outside the filter pass band.
The output compliance voltage of the AD9853 is ≠0.5 V to
+1.5 V. Any signal developed at the DAC output should not
exceed +1.5 V, otherwise, signal distortion will result. Further-
more, the signal may extend below ground as much as 0.5 V
without damage or signal distortion. The use of a transformer
with a grounded center-tap for common-mode rejection results
in signals at the AD9853 DAC output pins that are symmetrical
about ground.
As previously mentioned, by differentially combining the two
signals the user can provide some degree of common-mode
signal rejection. The amount of rejection is dependent upon
how closely the common-mode signals of each output are
matched in amplitude and phase. If the signals are exactly alike,
then ideally, there would be 100 percent rejection in a perfect
differential amplifier or combiner. A differential combiner might
consist of a transformer or an op amp. The object is to combine
or amplify only the difference between two signals and to reject
any common, usually undesirable, characteristic, such as 60 Hz
hum or "clock feed through" that is present on both input sig-
nals. The AD9853 true and complement outputs can be differ-
entially combined and, in fact, are configured as such on the
AD9853-XXPCB evaluation board. This evaluation board
utilizes a broadband 1:1 transformer with a grounded, center-
tapped primary to perform differential combining of the two
DAC outputs.

AD9853
≠27≠
REV. C
REFERENCE CLOCK MULTIPLIER
Due to the fact that the AD9853 is a DDS-based modulator, a
relatively high frequency system clock is required. For DDS
applications the carrier is typically limited to about 40% of
f
CLOCK
. For a 65 MHz carrier, the system clock required is
above 150 MHz. To avoid the cost associated with these high
frequency references, and the aggravating noise coupling issues
associated with operating a high frequency clock on a PC board,
the AD9853 provides an on-chip 6
◊
clock multiplier. With the
6
◊
on-chip multiplier, the input reference clock required for the
AD9853 can be kept in the 20 MHz to 30 MHz range, which
results in cost and system implementation savings. The 6
◊
REFCLK multiplier maintains clock integrity as evidenced by
the AD9853's system phase noise characteristics of ≠100 dBc/Hz
and virtually no clock related spurious in the output spectrum.
External loop filter components consisting of a series resistor
(1.3 k
) and capacitor (0.01
µ
F) provide the compensation
zero for the 6
◊
REFCLK PLL loop. The overall loop perfor-
mance has been optimized for these component values.
Table VI. Derivation of Currently Transmitted Symbol
Quadrant
Current
MSBs of
MSBs for
Input
Quadrant
Previously
Currently
Bits
Phase
Transmitted
Transmitted
I Q
Change
Symbol
Symbol
00
0
∞
11
11
00
0
∞
01
01
00
0
∞
00
00
00
0
∞
10
10
01
90
∞
11
01
01
90
∞
01
00
01
90
∞
00
10
01
90
∞
10
11
11
180
∞
11
00
11
180
∞
01
10
11
180
∞
00
11
11
180
∞
10
01
10
270
∞
11
10
10
270
∞
01
11
10
270
∞
00
01
10
270
∞
10
00
Note: This table applies to both DQPSK and D16-QAM formats.
In DQPSK a symbol is comprised of two bits that are denoted
as " I(1) Q(1)." In this case, I(1) and Q(1) are the MSBs and
the table can be interpreted directly. In D16-QAM a symbol is
defined as comprised of four bits denoted as "I(1) Q(1) I(0) Q(0)."
I(1), Q(1) are the MSBs and I(0), Q(0) are the LSBs. As indi-
cated in the table, only the MSBs I(1) and Q(1) are altered as a
function of the differential coding; I(0) and Q(0) are not altered.
DEVICE THERMAL CONSIDERATIONS
The AD9853 is specified to operate at an ambient temperature
of up to +85
∞
C. The maximum junction temperature (T
J
) is
specified at +150
∞
C, which provides a worst case junction-to-air
differential of +65
∞
C. Thus, with the specified
JA
of +36
∞
C/W,
a maximum device dissipation of 1.8 W is achievable under the
worst case conditions. It is important to understand that a sig-
nificant portion of the heat generated by the device is trans-
ferred to the environment via the package leads. The specified
JA
value assumes that the device is soldered to a multilayer
printed circuit board (PCB) with the device power and ground
pins connected directly to power and ground planes of the PCB.
The amount of power internally generated by the device is pri-
marily dependent on four factors:
∑
Power Supply Voltage
∑
System Clock Rate
∑
Input Data Rate
∑
T
X
ENABLE Duty Cycle (assuming the device is operated in
the burst data mode)
The power generated by the device increases with an increase in
any one of the four factors. It turns out that the contribution of
generated power due to the system clock rate, input data rate
and T
X
ENABLE duty cycle may be ignored at power supply
voltages of less than 4 V (as the total power generated by the
device will not exceed 1.8 W). However, for supply voltages
greater than 4 V, operation at +85
∞
C ambient temperature will
require a tradeoff among the other three factors; i.e., a reduced
system clock rate, a reduced data rate, a reduced T
X
ENABLE
duty cycle, or some combination of the three. It should be men-
tioned, that operation at a power supply voltage of 4 V yields the
same level of performance as specified at 5 V operation. For
example, the user may still take advantage of the 165 MHz
maximum system clock rate specified for 5 V operation.
V
DD
I
OUT
I
OUTB
DIGITAL
OUT
V
DD
(b)
V
DD
DIGITAL
IN
(a)
(c)
Figure 38. Equivalent I/O Circuits
AD9853-xxPCB EVALUATION BOARD
Two versions of evaluation boards are available for the AD9853
digital QPSK/16-QAM modulator: the AD9853-45PCB and
the AD9853-65PCB. The ≠ 45 contains a 45 MHz low-pass
filter to support a 5 MHz≠42 MHz output bandwidth and the
≠65 has a 65 MHz low-pass filter to support a 5 MHz≠65 MHz
output bandwidth.
Both versions of the evaluation board contain the AD9853
device, a REFCLOCK oscillator, a seventh order elliptic low-
pass filter of the designated frequency, an AD8320 program-
mable cable driver amplifier, operating software for Windows
Æ
3.1 or Windows 95, and a booklet of complete operating in-
structions and performance graphs. The evaluation board pro-
vides an optimal environment for menu-driven programming of
the devices and analysis of output spectral performance.
Part Number
On-Board Low-Pass Filter
AD9853-45PCB
45 MHz
AD9853-65PCB
65 MHz
Windows is a registered trademark of Microsoft, Corporation.

AD9853
≠28≠
REV. C
C33
10 F
+10V
FEC (SW2) FUNCTIONS
JUMPER FUNCTION
1-2
SOFT FEC
ENABLE/DISABLE
2-3
HARD FEC DISABLE
OPEN
HARD FEC ENABLE
OR EXTERNAL FEC
CONTROL VIA J11
WHEN USING
TRANSFORMER T1A,
REMOVE R3 AND R6
WHEN NOT USING T1A,
CONNECT E13 TO E14
AND LEAVE R3 AND
R6 IN PLACE
TST1
HI 4DM
J9
2
4
6
8
10
12
14
1
3
5
7
9
11
13
REST
E13
T1A
T1 ≠ 1T
SIG
R6
25
4
2
6
1 : 1
E14
GND
CA EN
AGND
IOUT
IOUTB
TEST OUT2
TEST CLK
TEST LATCH
TSTDATA IN
TSTDATA EN
TSTDATA OUT
RESET
AVDD
DAC BL
AVDD
AGND
DAC RSET
NC
AGND
PLL FILTER
PLL VCC
PLL GND
GND
CA CLK
CA DATA
DGND
DVDD
REF CLK IN
DGND
DVDD
DATA IN
TX ENABLE
DVDD
DGND
DGND
DVDD
BUS CLK
FEC EN
ADDRESS BIT
DGND
DVDD
DGND
DGND
TESTOUT1
BUSDAT IN
AD9853
U1
34
CAC
CAD
DUT+V
CLK
DUT+V
SDI
TXE
DUT+V
44
TST1
SMB
J10
EXTERNAL
FEC ENABLE
R7
3.9k
+5V
FECC
1 2 3
SW2
H3M
DIGITAL
MODULATOR
22
12
21
20
19
18
17
16
15
14
13
C31
0.1 F
R4
3.9k
DUT+V
C10
0.01 F
33
23
32 31 30 29 28 27 26 25 24
CAE
DUT+V
BDAT
BCLK
GND
1
3
DUT+V
DUT+V
DUT+V
GND
GND
R5
1300
DUT+V
NOTE:
C31 NORMALLY
NOT POPULATED
35
36
37
38
39
40
41
42
43
1
11
2
3
4
5
6
7
8
9
10
C25
0.1 F
DUT+V
C24
0.1 F
DUT+V
C23
0.1 F
DUT+V
C30
0.1 F
DUT+V
C29
0.1 F
DUT+V
DAC OUT/
FILTER IN
SMB
J6
E9
E1
E10
SIG
E2
SIG
R3
50
C6
68pF
(33pF)
C3
7pF
(6.8pF)
1
2
C9
56pF
(39pF)
E3 E4
E11 E12
AMP
SMB
J7
FILTER OUT/
AMP IN
C7
100pF
(82pF)
C4
33pF
(33pF)
C5
22pF
(27pF)
C8
82pF
(82pF)
L1
120NH
(180NH)
L2
100NH
(100NH)
L3
100NH
(150NH)
1
2
1
2
7TH ORDER ELIPTIC 50 LOW PASS FILTER
VALUES IN PARENTHESES ≠ 45 MHz FILTER
VALUES NOT IN PARENTHESES ≠ 65 MHz FILTER
T
X
ENABLE
JUMPER CONFIGURATION
JUMPER
FUNCTION
E5-E6
HEADER CONNECTOR
FROM DG2020,
DATA GENERATOR
E7-E8
SOFTWARE CONTROL
OF T
X
ENABLE
OPEN
HARD ENABLE OR
EXT. CONTROL VIA J4
T
X
ENABLE
E7 E5
E8 E6
SMB
J4
R11
3.9k
+5V
TXE
TXEE
GND
+5V
C17
0.1 F
Y1
14
VCC
OUT
8
GND
SW41
CLK
SMB
J2
R1
50
EXTERNAL
CLK
7
CRYSTAL OSC.
IF CLOCK
REMOVE SOURCE IS
Y1 J2 (EXTERNAL)
R1 Y1 (XTAL)
JUMPER FUNCTION
1-2
HARD POWER-DOWN
2-3
HARD POWER-DOWN
OR EXTERNAL CONTROL
VIA J3
NO
JUMPER
POWERED UP
AD8320 POWER-DOWN
SW1 FUNCTIONS
8PPT+5V
RZ1
2
3
4
5
6
7
8
LATCH
BUSCLK
BUSDAT
RESET
TXEN
BDAT
TSTATE
2.2k PULL-UP
NETWORK
TO +5V
THREE-STATE BUFFER
U4
74AC244
2A4 2Y4
2A3 2Y3
2A2 2Y3
2A1 2Y2
1A4 1Y4
1A3 1Y3
1A2 1Y2
1A1 1Y1
17
15
13
11
8
6
4
2
GND
GND
GND
BDAT
DAT
3
5
7
9
12
14
16
18
RBAK
BDAT
1G 2G
TSTAT
19
1
+5V
C22
0.1 F
LATCH
+5V
R8
3.9k
FEC
U3
74ACT573
9
8
7
6
5
4
3
2
TXEN
TSTATE
RESET
BUSDAT
BUSCLK
12
13
14
15
16
17
18
19
FECC
TXEE
TSAT
REST
DAT
BCLK
11
1
LATCH
C34
0.001 F
8D 8Q
7D 7Q
6D 6Q
5D 5Q
4D 4Q
3D 3Q
2D 2Q
1D 1Q
EN OE
+5V
C21
0.1 F
"CENTRONICS"
PRINT PORT
CONN.
C36CRPX
LATCH
BUSCLK
BUSDAT
RESET
FEC
TXEN
TSTATE
RBAK
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
J1
C20
10 F
+10V
TB1
POWER INPUT
CONNECTOR
DUT+V
GND
+5V
GND
+10V
1
2
3
4
5
75
OUTPUT
SMB 75
J8
C12
0.1 F
C2
0.1 F
VCCL
VIN
VREF
VCC
GND
GND
BYP
GND
GND
GND
20
19
18
17
16
15
14
13
12
11
+10V
+10V
CAD
CAC
CAE
GND
PDN
+10V
+10V
+10V
C32
0.1 F
PROGRAMMABLE
GAIN AMPLIFIER
C1
0.1 F
C11
0.1 F
R2
62
AMP
SDATA
CLK
DATEN
GND
VOCM
PD
VCC
VCC
VCC
VOUT
AD8320
U2
1
2
3
4
5
6
7
8
9
10
C16
0.1 F
+10V
SERIAL DATA IN
SMB
J5
R12
3.9k
+5V
SDI
SDI
SMB
J3
PODN
R10
3.9k
AD8320
EXTERNAL
POWERDOWN
1
2
3
GND
PDN
PODN
H3M
SW1
AD8320
POWERDOWN
SOURCE
SWITCH
C26
0.1 F
DUT+V
C27
0.1 F
DUT+V
C28
0.1 F
DUT+V
C15
0.1 F
+10V
C19
10 F
DUT+V
C13
10 F
+10V
C14
0.1 F
+10V
C18
10 F
+5V
Figure 39. Electrical Schematic of AD9853-xxPCB Evaluation Board

AD9853
≠29≠
REV. C
a. Layer 1 (Top) ≠ Signal Routing and Ground Plane
b. Layer 2 ≠ Ground Plane
Figure 40. PCB Layout Patterns for the Four-Layer AD9853-xxPCB Evaluation Board
c. Layer 3 ≠ DUT +V, +5 V, and +12 V Power Plane
d. Layer 4 (Bottom) ≠ Signal Routing

AD9853
≠30≠
REV. C
Plots of typical output spectrum from the AD9853-45PCB
evaluation board (conditions: DUT supply voltage = +3.3 V,
QPSK modulation, 2.048 Mb/s, 20.48 MHz ext. REFCLK,
6
◊
REFCLK enabled, SRRC filter function, A
OUT
= 40 MHz,
= 0.25, 50 MHz low-pass filter).
≠25
≠35
REF 50.0MHz
INC 10MHz
RES bw 60MHz
VID bw 5.4kHz
10.0MHz/div
500ms/div
≠65
≠95
≠105
≠45
≠55
≠85
≠75
ATTEN 30dB 50
TG off
Figure 41. Direct DAC Output
≠25
≠35
REF 50.0MHz
INC 10MHz
RES bw 10MHz
VID bw 5.4kHz
10.0MHz/div
500ms/div
≠65
≠95
≠105
≠45
≠55
≠85
≠75
ATTEN 30dB 50
TG off
2ND HARMONIC
Figure 42. Output of AD8320 Programmable Line Driver
Amplifier Driven by AD9853 Modulator
Plots of typical output spectrum from the AD9853-65PCB
evaluation board (conditions: DUT supply voltage = +4.0 V,
QPSK modulation, 2.7792 Mb/s, 27.792 MHz ext. REFCLK,
6
◊
REFCLK enabled, SRRC filter function, A
OUT
= 60 MHz,
= 0.25, 70 MHz low-pass filter).
≠25
≠35
REF 100.0MHz
INC 20MHz
RES bw 10MHz
VID bw 5.4kHz
20.0MHz/div
1s/div
≠65
≠95
≠105
≠45
≠55
≠85
≠75
ATTEN 10dB 50
TG off
Figure 43. Direct DAC Output
≠2.0
12.0
REF 100.0MHz
INC 20MHz
RES bw 10MHz
VID bw 5.4kHz
20.0MHz/div
1s/div
42.0
72.0
82.0
22.0
32.0
62.0
52.0
ATTEN 30dB 50
TG off
2ND
HARMONIC
3RD
HARMONIC
Figure 44. Output of AD8320 Programmable Line Driver
Amplifier Driven by AD9853 Modulator
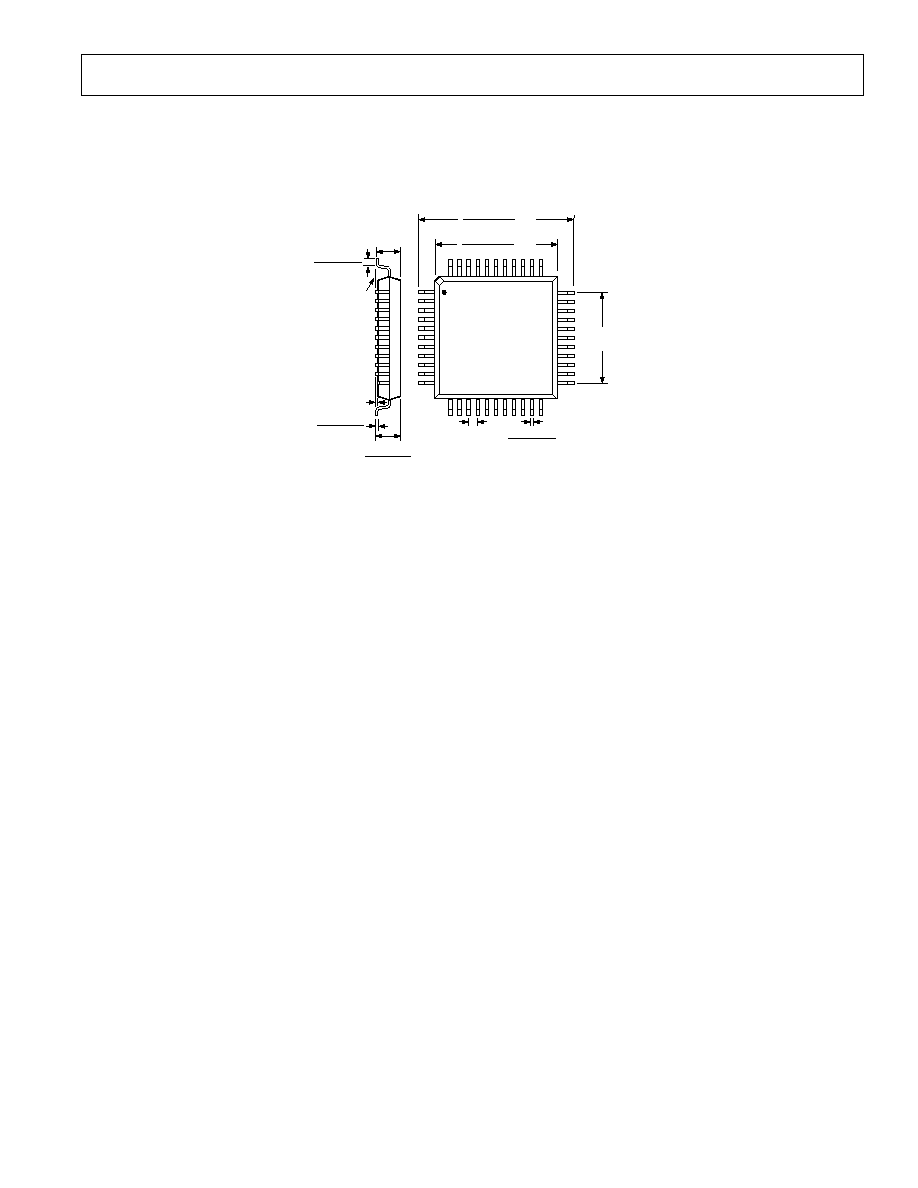
AD9853
≠31≠
REV. C
OUTLINE DIMENSIONS
Dimensions shown in inches and (mm).
44-Lead Metric Quad Flatpack (MQFP)
(S-44A)
TOP VIEW
(PINS DOWN)
1
33
34
44
11
12
23
22
0.530 (13.45)
0.510 (12.95)
SQ
0.031 (0.80)
BSC
0.018 (0.45)
0.012 (0.30)
0.398 (10.10)
0.390 (9.90)
SQ
0.315 (8.00)
REF
0.083 (2.10)
0.077 (1.95)
0.010 (0.25)
MAX
0.009 (0.23)
0.005 (0.13)
SEATING
PLANE
0.096 (2.45)
MAX
0.041 (1.03)
0.029 (0.73)
C3361c≠0≠2/99
PRINTED IN U.S.A.