 | –≠–ª–µ–∫—Ç—Ä–æ–Ω–Ω—ã–π –∫–æ–º–ø–æ–Ω–µ–Ω—Ç: KB9223 | –°–∫–∞—á–∞—Ç—å:  PDF PDF  ZIP ZIP |
PRELIMINARY
RF AMP & SERVO SIGNAL PROCESSOR
1
KB9223 / KB9223-L
M/M-97-P006
1997. 10. 17
80-QFP-1420C
ORDERING INFORMATION
APPLICATIONS
∑ CD Player
∑ Video-CD
RELATED PRODUCT
∑ KS9286 Data Processor
∑ KS9284 Data Processor
∑ KA9258D/KA9259D Motor Driver
Device
Package
Tempe. Range
KB9223
80-QFP-1420C
-20
∞
C ~ +70
∞
C
KB9223-L
OVERVIEW
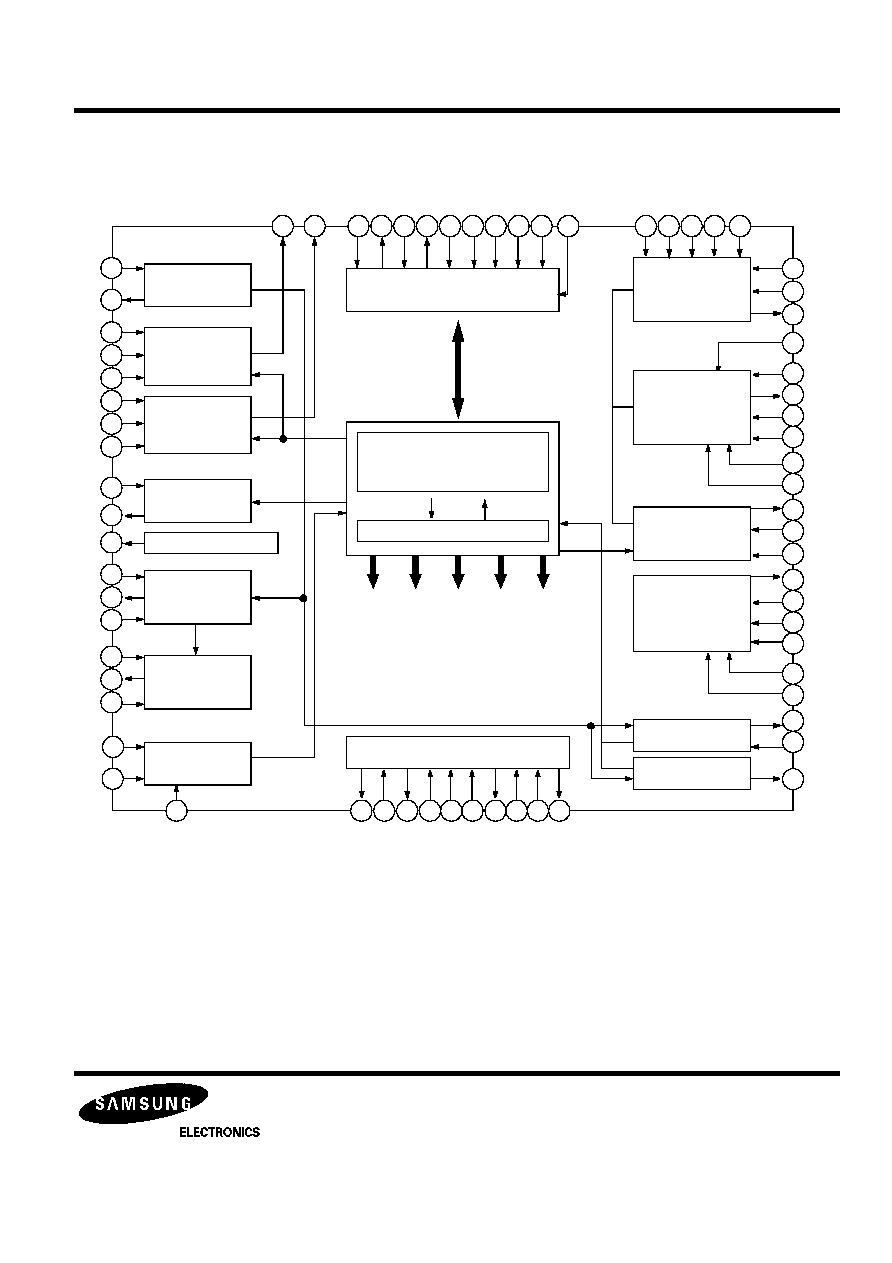
The KB9223 is a 1-chip BICMOS integrated circuit to per-
form the function of RF amp and servo signal processor for
compact disc player applications.It consist of blocks for RF
signal processing ,focus, tracking, sled and spindle
servo.Also this IC has adjustment free function and embed-
ded opamp for audio post filter.
FEATURES
∑ RF amplifier & RF equalizer
∑ Focus error amplifier & servo control
∑ Tracking error amplifier & servo control
∑ Mirror & defect detector circuit
∑ Focus OK detector circuit
∑ APC(Auto Laser Power Control) circuit for constant laser
power
∑ FE bias & focus servo offset adjustment free
∑ EF balance & tracking error gain adjustment free
∑ Embedded audio post filter
∑ The circuit for Interruption countermeasure
∑ Double speed play available
∑ Operating voltage range
KB9223 : 5V
KB9223-L : 3.4V
PRELIMINARY
RF AMP & SERVO SIGNAL PROCESSOR
2
KB9223 / KB9223-L
M/M-97-P006
1997. 10. 17
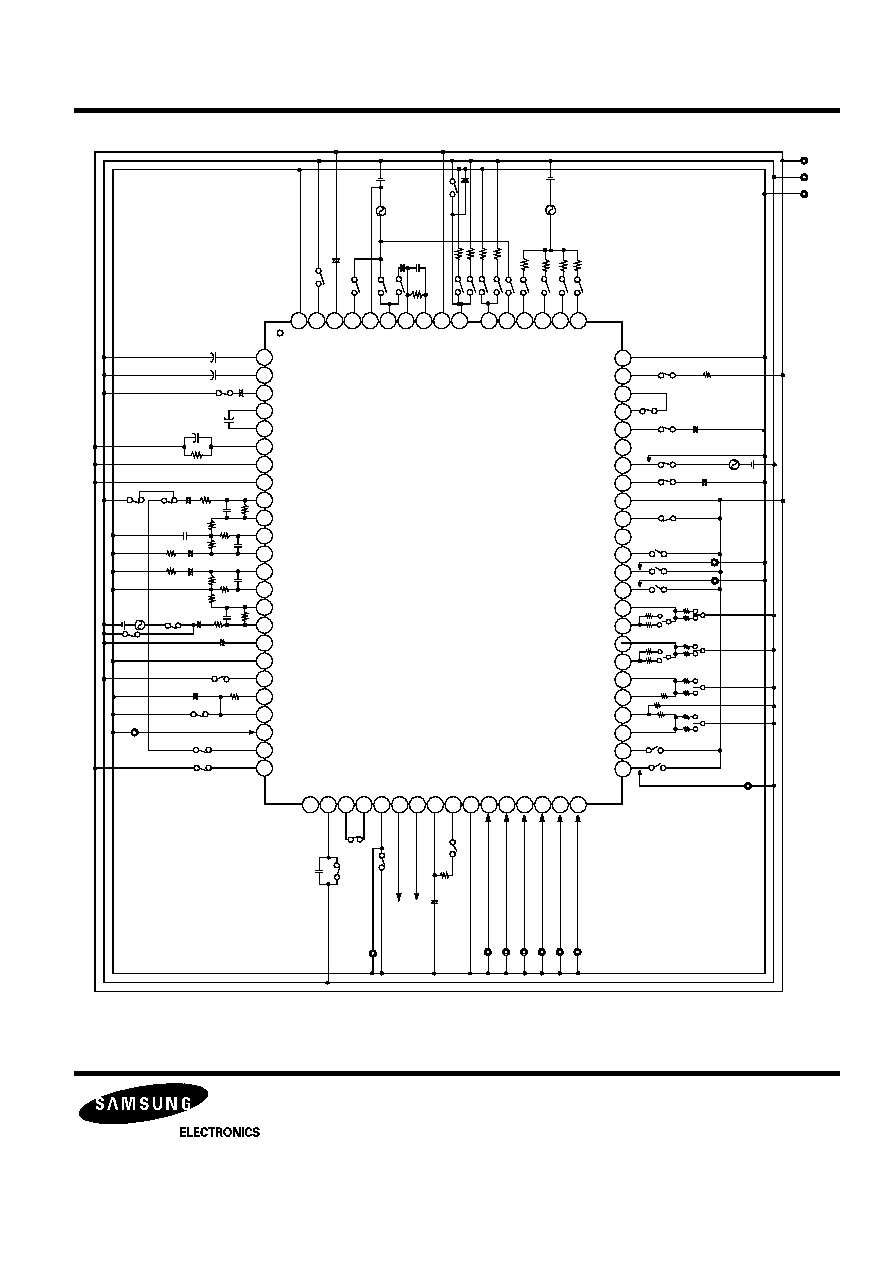
BLOCK DIAGRAM
Figure 1. Block diagram
73
74
65
66
63
67
68
79
69
70
71
78
76
75
32
33
77
2
4
RF Amp
59
Focus Error Amp
FE-BIAS Adjustment
Tracking Error Amp
E/F Balance & Gain
Control
APC Amp
LDON
Center Voltage Amp.
RF Level AGC
Equalizer
EFM
Comparator
Defect Detection
Circuit
54
22
30
29
31
38
37
36
35
51
52
58
26
28
27
Micom Data
Interface Logic
60
47
48
57
49
50
53
55
62
61
43
44
42
46
45
23
24
25
6
39
1
40
5
15
16
13
14
19
17
12
11
9
10
Focus Phase
Compensation
& Offset cancel circuit
Tracking Phase
Compensation Block
& Jump Pulse GEN.
Sled Servo Amplifier
& Sled Kick GEN.
Spindle Servo LPF
( Double Speed )
Mirror Detection
Circuit
FOK Detection
Circuit
MICOM TO SERVO CONTROL
AUTO SEQUENCER
ADJUSTMENT-FREE CONTROL
Built-in Post Filter Amp ( L&R )
FS1~
FS4
TM1~
TM6
BAL1~
BAL5
PS1~
PS4
GA1~
GA5
RF-
RFO
PD1
PD2
F
E
EI
PD
LD
VR
EQO
IRF
ASY
EFM
RFI
DCB
D
C
C
1
G
C
1
O
G
C
1
I
C
H
1
O
C
H
1
I
M
U
T
E
I
R
R
C
C
H
2
O
C
H
2
I
G
C
2
I
G
C
2
O
FDFCT
FE-
FEO
TDFCT
TE-
TEO
TE2
LPFT
SLO
SL-
SL+
SPDLO
SPDL-
SMDP
SMON
SMEF
FSET
MIRROR
MCP
FOK
TG2
TGU
F
E
1
T
E
1
M
L
T
T
Z
C
F
E
2
F
L
B
F
G
D
F
S
3
3
&
W
D
C
H
T
R
C
N
T
L
O
C
K
I
S
T
A
T
R
E
S
E
T
M
D
A
T
A
M
C
K
A
T
S
C
F
R
S
H
DCC2
FEBIAS
EQC

PRELIMINARY
RF AMP & SERVO SIGNAL PROCESSOR
3
KB9223 / KB9223-L
M/M-97-P006
1997. 10. 17
PIN CONFIGURATION
Figure 2. Pin configuration
1
2
3
4
5
6
7
8
9
10
11 12
13
14
15
16
17
18 19
20 21
22 23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
64 63 62 61
60 59
58
57
56 55
54 53
52
51 50
49
48
47 46
45 44 43
42 41
80
79
78
77
76
75
74
73
72
71
70
69
68
67
66
65
KB9223
M
C
P
D
C
B
F
R
S
H
D
C
C
2
D
C
C
1
F
S
E
T
V
D
D
A
V
C
C
P
G
C
2
I
G
C
2
O
C
H
2
I
C
H
2
O
C
H
1
O
C
H
1
I
G
C
1
O
G
C
1
I
R
R
C
V
S
S
P
M
U
T
E
I
I
S
E
T
V
R
E
G
W
D
C
K
S
M
D
P
S
M
O
N
SMEF
FLB
FS3
FGD
LOCK
TRCNT
ISTAT
ASY
EFM
VSSA
MCK
MDATA
MLT
RESET
MIRROR
FOK
D
V
E
E
F
E
B
I
A
S
T
G
2
T
G
U
F
D
F
C
T
F
E
1
F
E
2
T
D
F
C
T
D
V
D
D
L
P
F
T
T
E
1
T
E
2
T
Z
C
A
T
S
C
T
E
O
T
E
-
F
E
O
F
E
-
S
P
D
L
O
S
P
D
L
-
S
L
-
S
L
O
S
L
+
S
S
T
O
P
GND
EI
EQC
RFI
EQO
IRF
RFO
RF-
VCC
VR
LD
PD
E
F
PD2
PD1

PRELIMINARY
RF AMP & SERVO SIGNAL PROCESSOR
4
KB9223 / KB9223-L
M/M-97-P006
1997. 10. 17
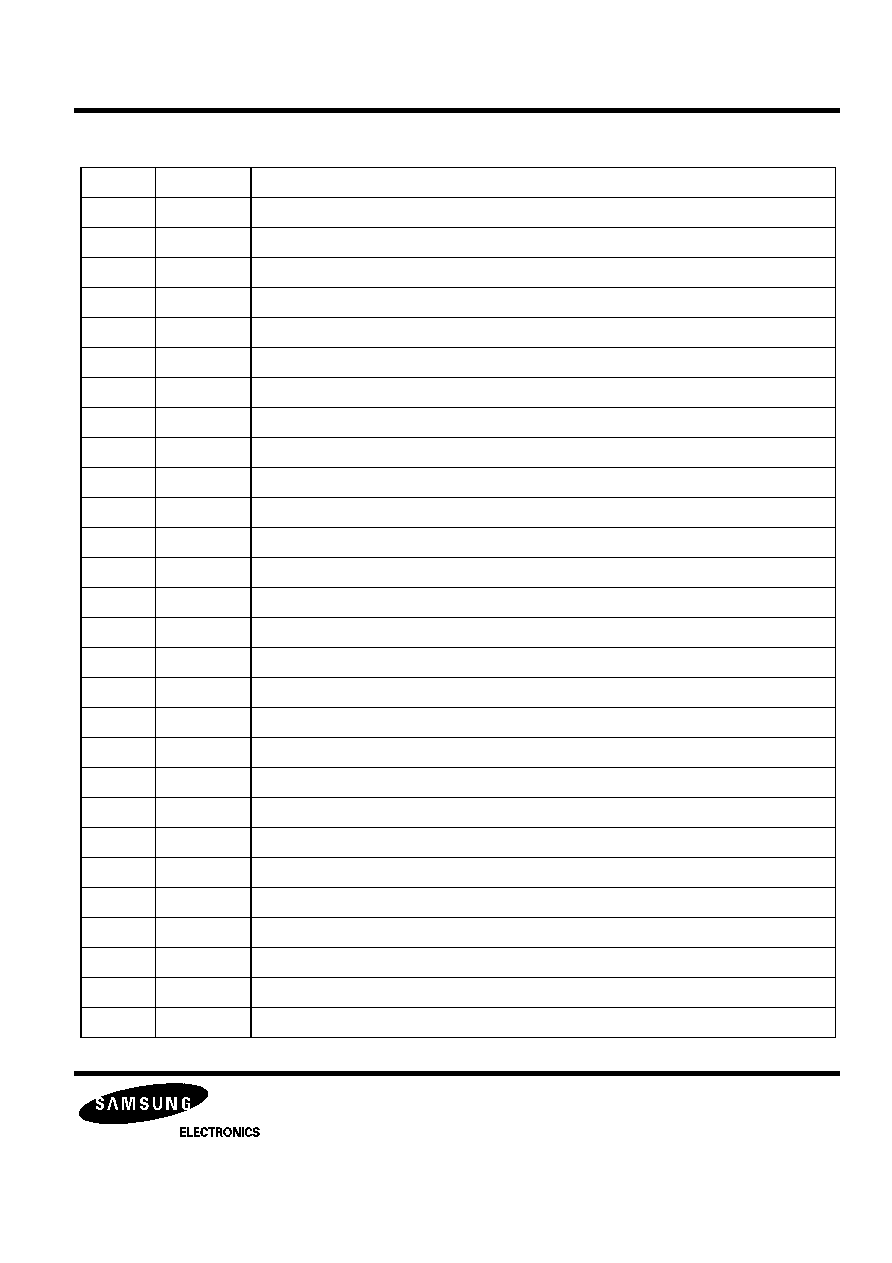
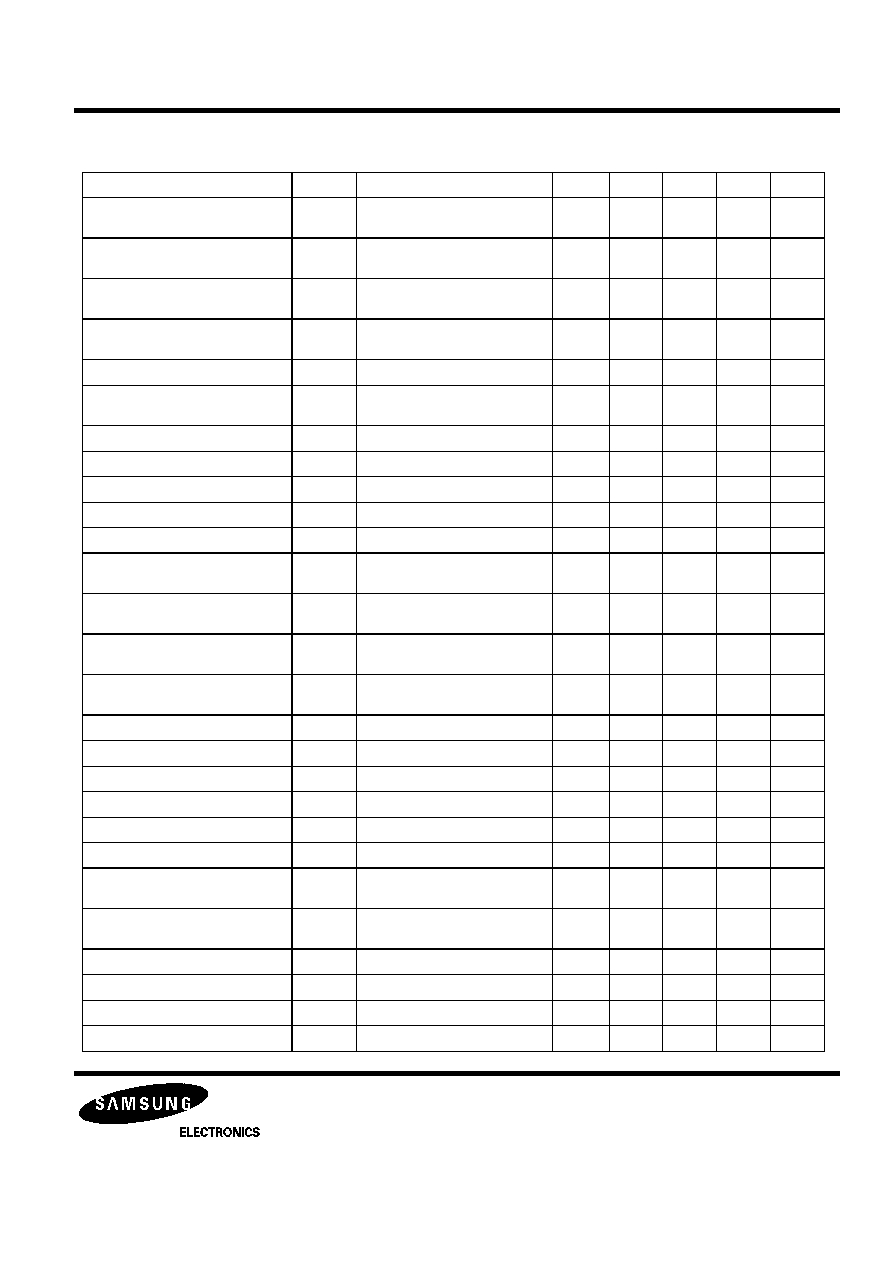
PIN DESCRIPTION
Table 1. PIN DESCRIPTION
Pin No.
Symbol
Description
1
MCP
Capacitor connection pin for mirror hold
2
DCB
Capacitor connection pin for defect Bottom hold
3
FRSH
Capacitor connection pin for time constant to generate focus search waveform
4
DCC2
The input pin through capacitor of defect bottom hold output
5
DCC1
The output pin of defect bottom hold
6
FSET
The peak frequency setting pin for focus,tracking servo and cut off frequency of CLV
LPF
7
VDDA
Analog VCC for servo part
8
VCCP
VCC for post filter
9
GC2I
Amplifier negative input pin for gain and low pass filtering of DAC output CH2
10
GC2O
Amplifier output pin for gain and low pass filtering of DAC output CH2
11
CH2I
The input pin for post filter channel2
12
CH2O
The output pin for post filter channel2
13
CH1O
The output pin for post filter channel1
14
CH1I
The input pin for post filter channel1
15
GC1O
Amplifier output pin for gain and low pass filtering of DAC output CH1
16
GC1I
Amplifier negative input pin for gain and low pass filtering of DAC output CH1
17
RRC
The pin for noise reduction of post filter bias
18
VSSP
VSS for post filter
19
MUTEI
The input pin for post filter muting control
20
ISET
The input pin for current setting of focus search,track jump and sled kick voltage
21
VREG
The output pin of regulator
22
WDCK
The clock input pin for auto sequence
23
SMDP
The input pin of CLV control output pin SMDP of DSP
24
SMON
The input pin for spindle servo ON through SMON of DSP
25
SMEF
The input pin of provide for an external LPF time constant
26
FLB
Capacitor connection pin to perform rising low bandwidth of focus loop
PRELIMINARY
RF AMP & SERVO SIGNAL PROCESSOR
5
KB9223 / KB9223-L
M/M-97-P006
1997. 10. 17
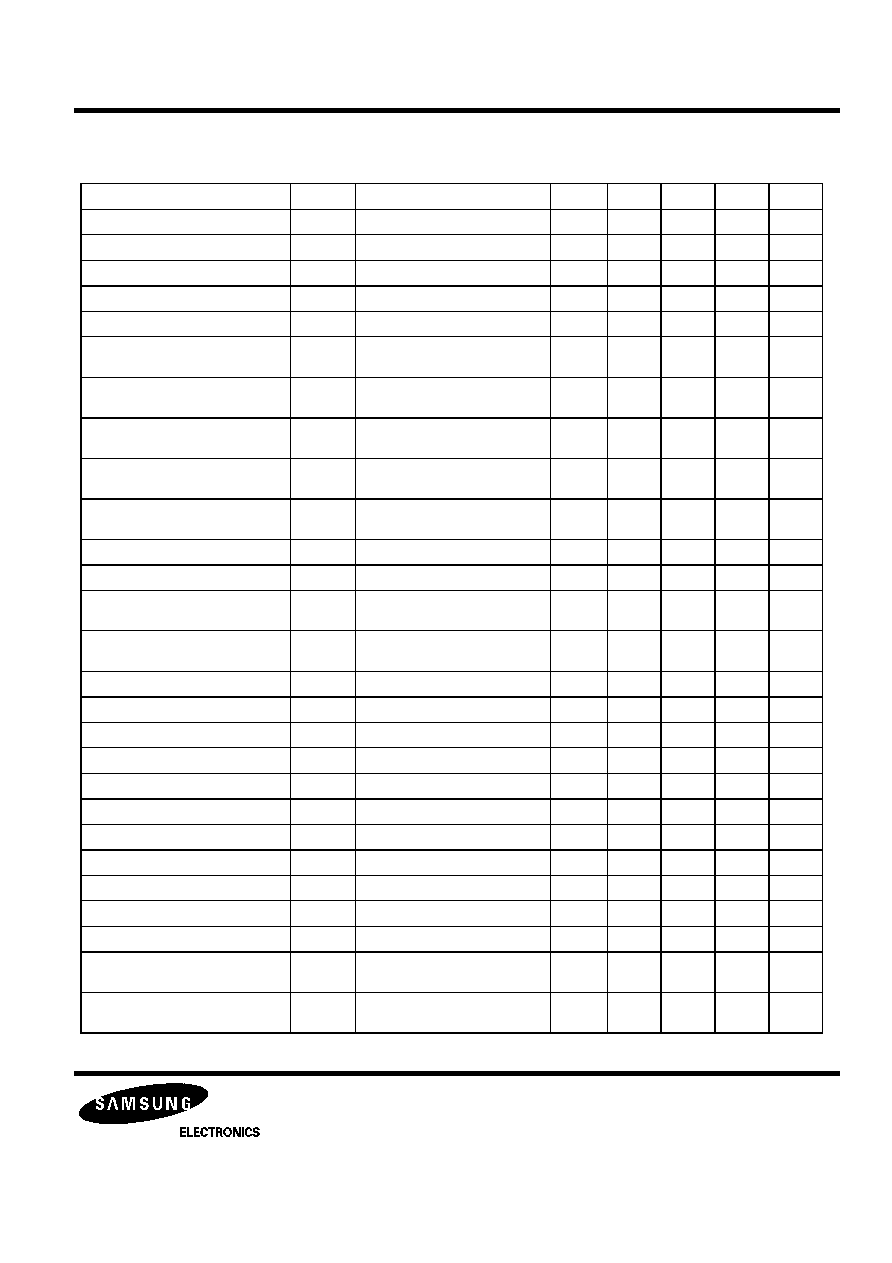
27
FS3
The pin for high frequency gain change of focus loop with internal FS3 switch
28
FGD
Reducing high frequency gain with capacitor between FS3 pin
29
LOCK
Sled runaway prevention pin
30
TRCNT
Track count output pin
31
ISTAT
Internal status output pin
32
ASY
The input pin for asymmetry control
33
EFM
EFM comparator output pin
34
VSSA
Analog VSS for servo part
35
MCK
Micom clock input pin
36
MDATA
Micom data input pin
37
MLT
Micom data latch input pin
38
RESET
Reset input pin
39
MIRROR
The mirror output for test
40
FOK
The output pin of focus OK comparator
61
TGU
The capacitor connection pin for high frequency tracking gain switch
62
TG2
The pin for high frequency gain change of tracking servo loop with internal TG2 switch
63
FEBIAS
Focus error bias voltage control pin
64
DVEE
The DVEE pin for logic circuit
65
PD1
The negative input pin of RF I/V amplifier1(A+C signal)
66
PD2
The negative input pin of RF I/V amplifier2(B+D signal)
67
F
The negative input pin of F I/V amplifier (F signal)
68
E
The negative input pin of E I/V amplifier(E signal)
69
PD
The input pin for APC
70
LD
The output pin for APC
71
VR
The output pin of (AVEE+AVCC)/2 voltage
72
VCC
VCC for RF part
73
RF-
RF summing amplifier inverting input pin
74
RFO
RF summing amplifier output pin
Table 1. PIN DESCRIPTION (Continued)
Pin No.
Symbol
Description

PRELIMINARY
RF AMP & SERVO SIGNAL PROCESSOR
6
KB9223 / KB9223-L
M/M-97-P006
1997. 10. 17
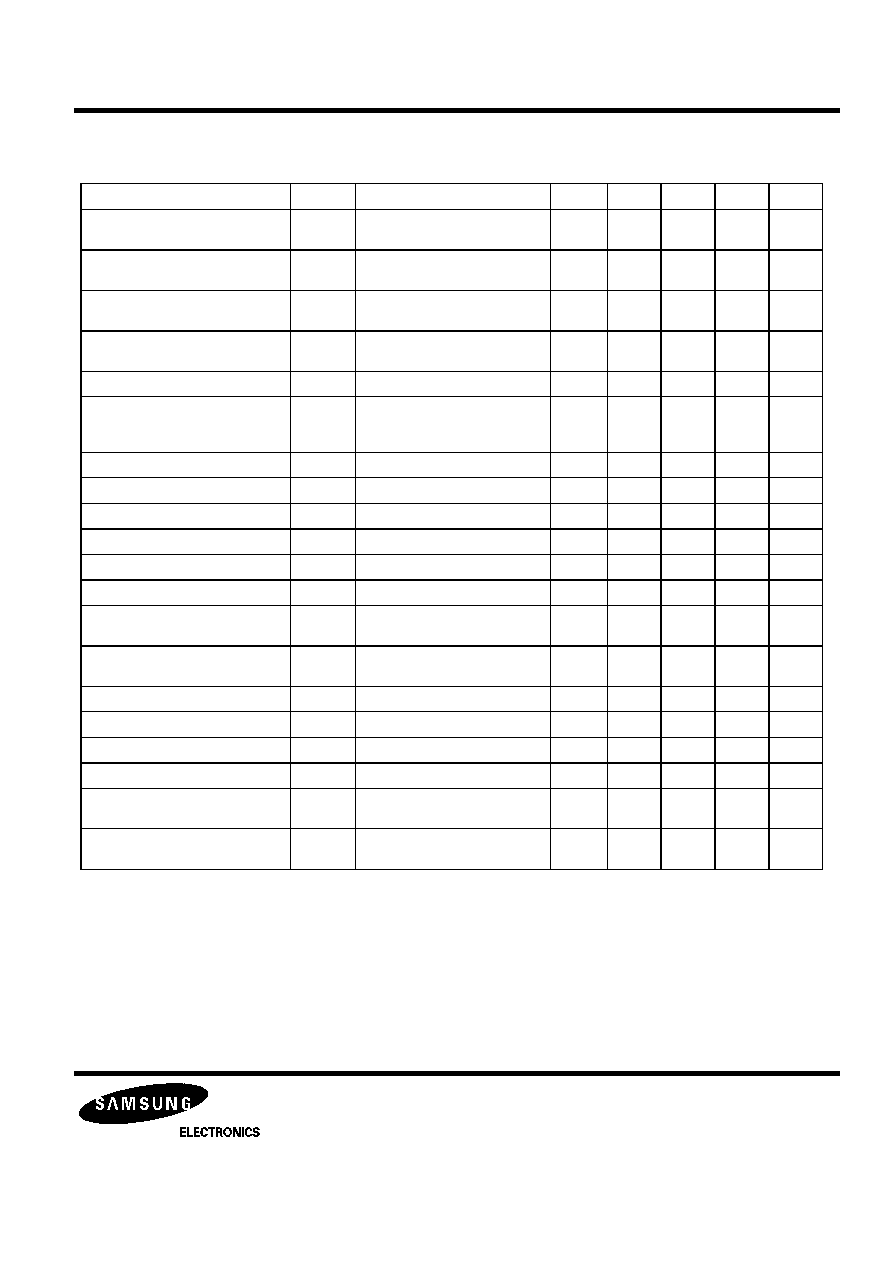
75
IRF
The input pin for AGC
76
EQO
The output pin for AGC
77
RFI
Tne input pin for EFM comparision
78
EQC
The capacitor connection pin for AGC
79
EI
Feedback input pin of E I/V amplifier for EF Balance control
80
GND
GND for RF part
Table 1. PIN DESCRIPTION (Continued)
Pin No.
Symbol
Description

PRELIMINARY
RF AMP & SERVO SIGNAL PROCESSOR
7
KB9223 / KB9223-L
M/M-97-P006
1997. 10. 17
ABSOLUTE MAXIMUM RATINGS
ELECTRICAL CHARACTERISTICS
Table 2. Absolute Maximum Ratings
Characteristic
Symbol
Value
Unit
Supply Voltage
Vmax
6
V
Power Dissipation
PD
200
mW
Operating Temperature
T
OPR
-20 ~ +70
o
C
Storage temperature
T
STG
-55 ~ +150
o
C
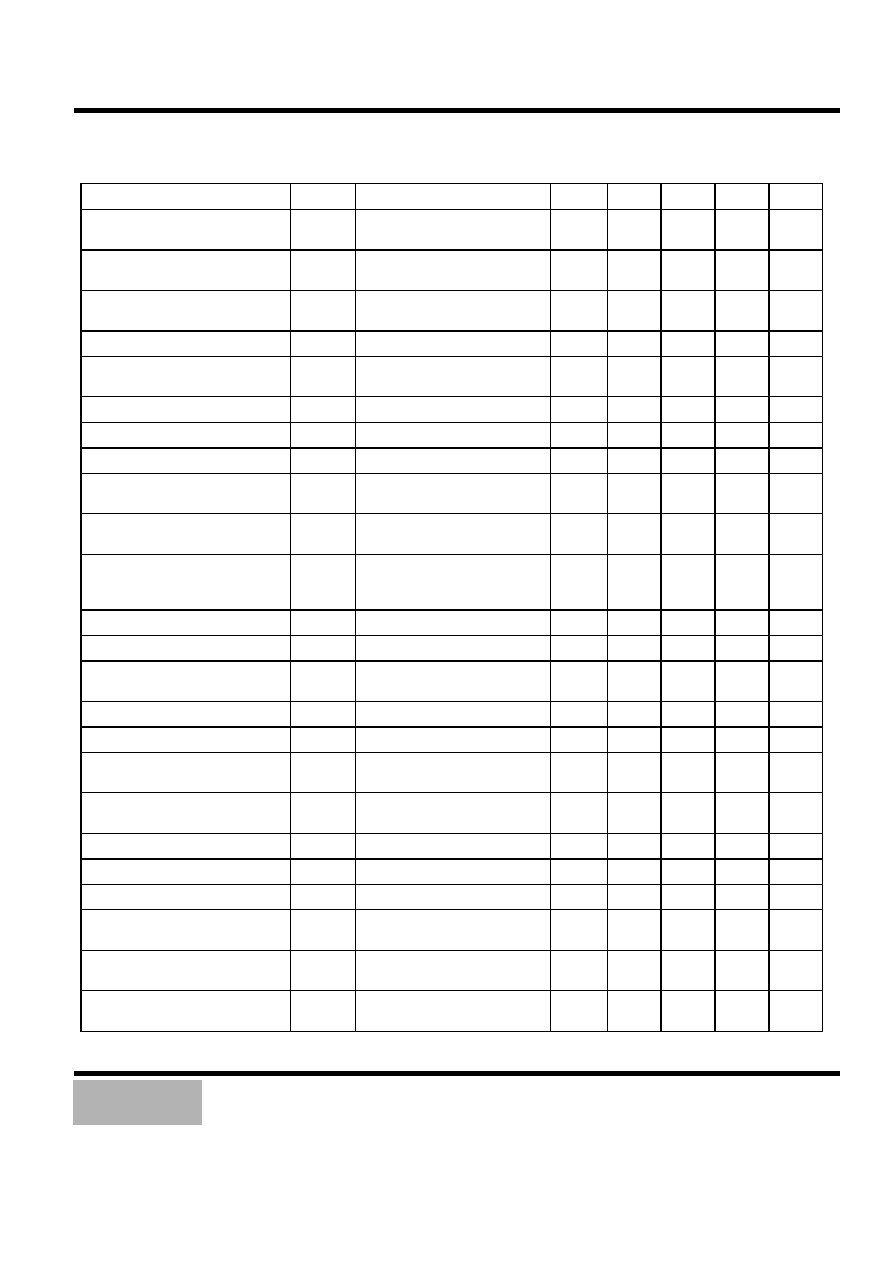
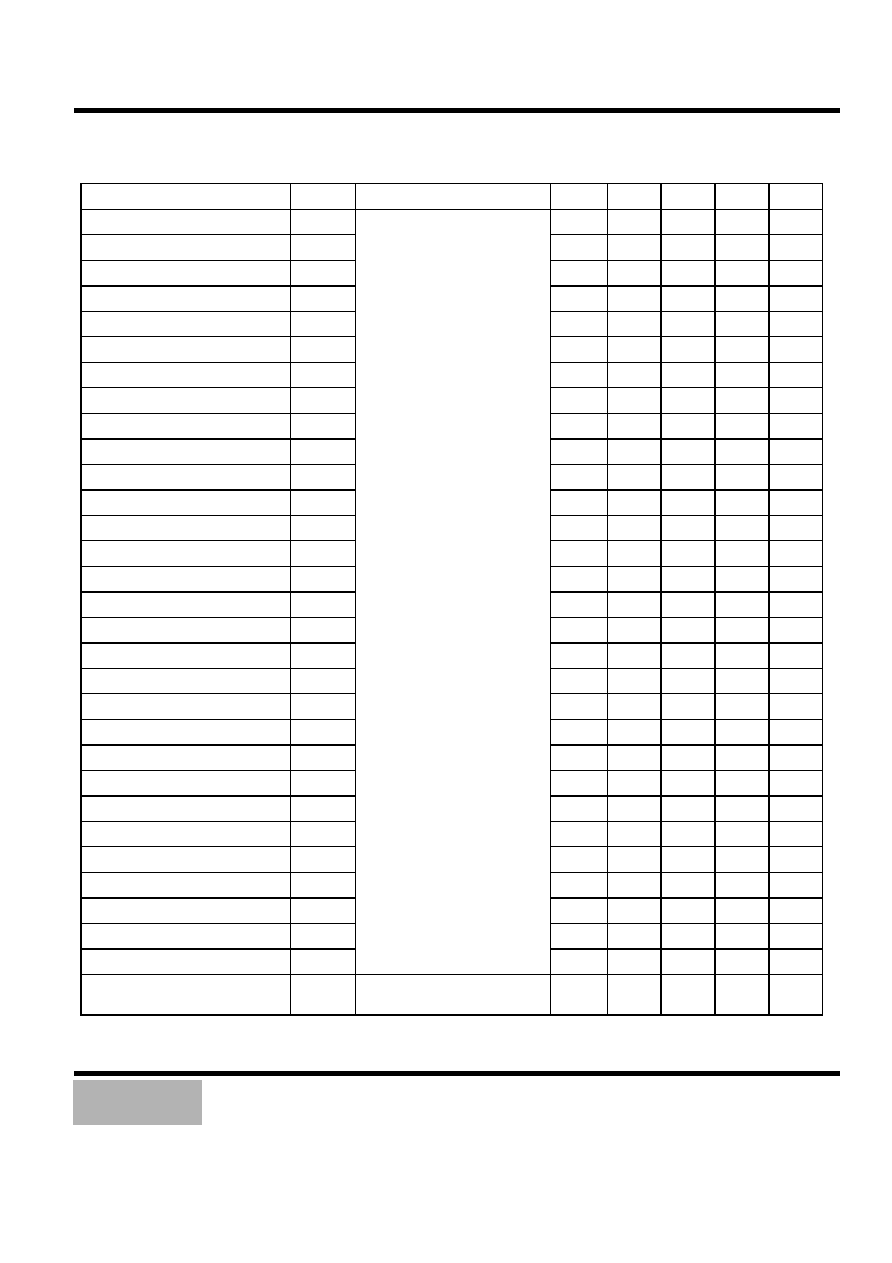
Table 3. Electrical Characteristics
(Ta=25
∞
C, VDD = DVDD = VCC = +5V, VSS = DVSS = GND = VSSP = 0V )
Characteristic
Symbol
Test Conditions
Output
Min
Typ
Max
Unit
Supply Current High
ICCHI
VCC=6V,No load
-
20
40
60
mA
Supply Current Typ
ICCTY
VCC=5V,No Load
-
12
30
48
mA
Supply Current Low
ICCLO
VCC=3.4V,No Load
-
10
25
40
mA
RF Amp Offset Voltage
Vrfo
input open
pin 74
-80
0
+80
mV
RF Amp Voltage Gain
Grf
SG3 f=10KHz,40mVp-p,sine
pin 74
25.1
28.1
31.1
dB
RF THD
Grfmd
SG3 f=1KHz,40mVp-p,sine
pin 74
-
-
5
%
RF Amp Max. Output Voltage
Vrfpp1
SG3 DC 2.7V
pin 74
3.8
-
-
V
RF Amp Min. Output Voltage
Vrfpp2
SG3 DC 2.3V
pin 74
-
-
1.2
V
Focus Error Amp Offset Voltage
Vfeo1
input open
pin 59
-450
-250
-50
mV
Focus Error Amp Auto Offset
Voltage
Vfeo2
WDCH=88.2KHz Pulse ,$841
pin 59
-35
0
35
mV
Focus Error Amp PD1 Voltage Gain
Gfe1
SG3 f=10KHz,32mVp-p,sine
pin 59
27
30
33
dB
Focus Error Amp PD2 Voltage Gain
Gfe2
SG3 f=10KHz,32mVp-p,sine
pin 59
27
30
33
dB
Focus Error Amp Voltage Difference
Gfe
Gfe1-
Gfe1
pin 59
-3
0
+3
dB
Focus Error Amp Max. Output
Voltage
Gfepp1
SG3 DC 2.7V
pin 59
4.4
-
-
V
Focus Error Amp Min. Output Volt-
age
Gfepp2
SG3 DC2.3V
pin 59
-
-
0.6
V
AGC Max Gain
Gagc
SG4 f=500KHz,20mVp-p,sine
pin 76
16
19
22
dB
AGC EQ Gain
Geq
Gain Difference of Gagc at
f=1.5MHz
pin 76
0
1
2
dB
AGC Gain2
Gagc2
SG4 f=500KHz,0.5Vp-p,sine
pin 76
3.5
6
9
dB
AGC Cpmpress Ratio
Cagc
Gain Difference of Gagc2 at
0.1Vp-p
pin 76
0
2.5
5
dB
AGC Frequency
Fagc
Gain Difference
SG4 f=1.5MHz,0.1Vp-p,sine
and f=500KHz,0.1Vp-p,sine
pin 76
-1.5
0
2.5
dB

PRELIMINARY
RF AMP & SERVO SIGNAL PROCESSOR
8
KB9223 / KB9223-L
M/M-97-P006
1997. 10. 17
Tracking Error Offset Voltage
Vteo
$800,$820,input open
pin 54
-50
0
+50
mV
Tracking Error Amp Voltage Gain F
Gtef
$800,$820
SG3 0.3Vp-p,10KHz,sine
pin 54
2.1
5.1
8.1
dB
Tracking Error AmpVoltage Gain E
Gtee
SG3 0.3Vp-p,40KHz,sine
pin 54
-0.75
2.25
5.25
dB
Tracking Error Amp
Voltage Gain Difference
Gte
Gtef-Gtee
pin 54
-0.25
2.75
5.75
dB
Tracking Error Amp
Maximum Output Voltage H
Vtepp1
DG3 DC 4.5V
pin 54
3.5
-
-
V
Tracking Error Amp
Minimum Output Voltage L
Vtepp2
SG3 DC 0.5V
pin 54
-
-
1.5
V
Tracking Error Amp Gain up F
Tguf
$830 SG3 0.3Vp-p,10KHz,sine
pin 54
8.0
11.0
14.0
dB
Tracking Error Amp Gain up E
Tgue
$830 SG3 0.3Vp-p,10KHz,sine
pin 54
5.3
8.3
11.3
dB
Tracking Gain Normal
Fgfn
SG3 0.3Vp-p,10KHz,sine,$820
pin 54
2.1
5.1
8.1
dB
Tracking F Gain 1
Fgf1
SG3 0.3Vp-p,10KHz,sine,$821
pin 54
0.1
3.1
6.1
dB
Tracking F Gain 2
Fgf2
SG3 0.3Vp-p,10KHz,sine,$822
pin 54
-1.7
1.3
4.3
dB
Tracking F Gain 3
Fgf3
SG3 0.3Vp-p,10KHz,sine,$824
pin 54
-5.0
-2.0
1.0
dB
Tracking F Gain 4
Fgf4
SG3 0.3Vp-p,10KHz,sine,$824
pin 54
-9.2
-6.2
-3.2
dB
Tracking E Balance Normal
Tben
SG3 0.3Vp-p,10KHz,sine,$800
pin 54
-0.27
2.27
5.27
dB
Tracking E Balance 1
Tbe1
SG3 0.3Vp-p,10KHz,sine,$801
pin 54
-0.51
2.51
5.51
dB
Tracking E Balance 2
Tbe2
SG3 0.3Vp-p,10KHz,sine,$802
pin 54
-0.74
2.74
5.74
dB
Tracking E Balance 3
Tbe3
SG3 0.3Vp-p,10KHz,sine,$804
pin 54
0.17
3.17
6.17
dB
Tracking E Balance 4
Tbe4
SG3 0.3Vp-p,10KHz,sine,$808
pin 54
1.03
4.03
7.03
dB
Tracking E Balance 5
Tbe5
SG3 0.3Vp-p,10KHz,sine,$810
pin 54
2.63
5.63
8.63
dB
FGFN-FGF1
FG1
-
-
0
1.5
3
dB
FGFN-FGF2
FG2
-
-
0.5
2.0
3.5
dB
FGFN-FGF3
FG3
-
-
2.0
3.25
4.5
dB
FGFN-FGF4
FG4
-
-
3.0
4.25
5.5
dB
TBE5 - TBE4
TB1
-
-
0.6
1.6
2.6
dB
TBE4 - TBE3
TB2
-
-
-0.14
0.86
1.86
dB
TBE3 - TBE2
TB3
-
-
-0.57
0.43
1.43
dB
TBE2 - TBE1
TB4
-
-
-0.77
0.23
1.23
dB
APC PSUB Voltage 1
Vapc1
LDON,$853,PN=open,
SG4 GND+85mV
pin 70
-
-
1.2
V
APC PSUB Voltage 2
Vapc2
LDON,$853,PN=open,
SG4 GND+185mV
pin 70
3.8
-
-
V
Table 3. Electrical Characteristics (Continued)
(Ta=25
∞
C, VDD = DVDD = VCC = +5V, VSS = DVSS = GND = VSSP = 0V )
Characteristic
Symbol
Test Conditions
Output
Min
Typ
Max
Unit
RF AMP & SERVO SIGNAL PROCESSOR
PRELIMINARY
14
KB9223 / KB9223-L
ELECTRONICS
M/M-97-P006
1997. 10 .17
APC NSUB Voltage 1
Vapc3
LDON,$857,PN=2.5V,
SG4 GND+95mV
pin 70
3.8
-
-
V
APC NSUB Voltage 2
Vapc4
LDON,$857,PN=2.5V,
SG4 GND+165mV
pin 70
-
-
1.2
V
APC LD Off Voltage 1
Vapc5
LDOFF,$85C,PN=open,SG4
2.5V
pin 70
4.0
-
-
V
APC LD Off Voltage 2
Vapc6
LDOFF,$858,PN=2.5V.SG4 2.5V
pin 70
-
-
1.0
V
APC Maximum Output Current H
Vapc7
LDON,$854,PN=open, SG4 GND
+ 185mV
pin 70
2.5
-
-
V
APC Minimum Output Current L
Vapc8
LDON,$854,SG4 GND + 85mV
pin 70
-
-
2.5
V
Mirror Maximum Output Voltage H
Vmirh
SG4 2.1V+0.8Vp-p,1KHz,sine
pin 39
4.3
-
-
V
Mirror Minimum Output Voltage L
Vmirl
SG4 2.1V+0.8Vp-p,1KHz,sine
pin 39
-
-
0.7
V
Mirror Minimum Operating
Frequency
Fmirh
SG4 2.1V+0.8Vp-p,900Hz,sine
pin 39
-
550
900
Hz
Mirror Maximum Operating
Frequency
Fmirb
SG4 2.1V+0.8Vp-p,30KHz,sine
pin 39
30
75
-
KHz
Mirror AM Frequency Characteristic
Fmir
SG4 2.1V+0.8Vp-p
600Hz,fc=500KHz
55% modulation
pin 39
-
400
600
Hz
Mirror Minimum Input Voltage
Vmir
SG4 2.1V+0.2Vp-p,10KHz,sine
pin 39
-
0.1
0.2
V
Mirror Maximum Input Voltage
Vmih
SG4 2.1V+1.8Vp-p,10KHz,sine
pin 39
1.8
-
-
V
FOK Threshold Voltage
Vfokt
SG4 2.25V~2.0V,DCsweep,
10mV step
pin 40
-420
-360
-300
mV
FOK Output Voltage H
Vfokh
SG4 DC 1.5V
pin 40
4.3
-
-
V
FOK Output Voltage L
Vfokl
SG4 DC 2.5V
pin 40
-
-
0.7
V
Defect Output Voltage H
Vdfcth
$863,SG3 2.520V+0.04Vp-p,
f=1Khz,sine
pin 41
4.3
-
-
V
Output Voltage L
Vdfcth
$863,SG3 2.520V+0.04Vp-p,
f=1Khz,sine
pin 41
-
-
0.7
V
Focus Loop Mute
Fmute
SG2 2.5V+0.1Vp-p,1KHz,sine
pin 48
-100
0
100
mV
Tracking Loop Mute
Tmute
SG2 2.5V+0.1Vp-p,1KHz,sine
pin 50
-100
0
120
mV
Interruption
Imute
SG2 2.5V+0.1Vp-p,1KHz,sine
pin 50
-100
0
120
mV
Defect Bottom Voltage
Fdfct1
SG3 2.520 V+0.04Vp-p,
1KHz,sine
pin 41
-
670
1000
Hz
Defect Max Freq. Voltage
Fdfct2
SG3 2.520V+0.04Vp-p,
2KHz,sine
pin 41
2.0
4.7
-
KHz
Defect Minimum Input Voltage
Vdfct1
SG 3 2.510V+0.020Vp-p,
1KHz,sine
pin 41
-
0.3
0.5
V
Table 3. Electrical Characteristics (Continued)
(Ta=25
∞
C, VDD = DVDD = VCC = +5V, VSS = DVSS = GND = VSSP = 0V )
Characteristic
Symbol
Test Conditions
Output
Min
Typ
Max
Unit
PRELIMINARY
RF AMP & SERVO SIGNAL PROCESSOR
10
KB9223 / KB9223-L
M/M-97-P006
1997. 10. 17
Defect Maximum Input Voltage
Vdfct2
SG32.535V+0.070Vp-p,
1KHz,sine
pin 41
1.8
-
-
V
EFM Duty Voltage 1
Defm1
SG4 2.5V+0.75Vp-p,
750KHz,sine
pin 32
-50
0
50
mV
EFM Duty Voltage 2
Defm2
SG42.75V+0.75Vp-p,
750KHz,sine
pin 32
0
50
100
mV
EFM Minimum input Voltage
Vefm1
SG4 2.5V+0.12Vp-p,
750KHz,sine
pin 33
-
-
0.12
V
EFM Maximum input Voltage
Vefm2
SG4 2.5V+1.8Vp-p,750KHz,sine
pin 33
1.8
-
-
V
EFM Maximum Operating
Frequency
Fefm
SG4 2.5V+0.75Vp-p,4MHz
pin 33
4
-
-
MHz
FZC Threshold Voltage
Vfzc
DC 2.5V+38mV,100mV
pin 31
39
69
100
mV
ATSC Threshold Voltage 1
Vatsc1
$10,SG2 DC 2.5V-6mV,-45mV
pin 31
-67
-32
-7
mV
ATSC Threshold Voltage 2
Vatsc2
SG2 DC 2.5V+6mV,+45mV
pin 33
7
32
67
mV
TZC Threshold Voltage
Vtzc
$20,SG2 DC 2.5V-20mV,+20mV
pin 31
-30
0
30
mV
SSTOP Threshold Voltage
Vsstop
$30,SG2 DC 2.5V-71mV,-30mV
pin 31
-100
-50
-30
mV
Tracking gain window voltage
VtGW
$840+$830 SG2 2.5V 2.9V 5mV
DC
pin 30
200
250
300
mV
Tracking gain window range
VTGW2
$848+$830 SG2 2.5V 5mV DC
sweep
pin 30
100
150
200
mV
Tracking balance window voltage
VTBW
$844+$810 SG2 2.555V ~
2.475V 5mV DC sweep
pin 31
-25
15
55
mV
Tracking balance window range
VTBW2
$844+$810 SG2 2.555V ~
2.470V 5mV DC sweep
pin 31
-25
15
55
mV
Vreg Threshold Voltage
Vreg
-
pin 21
3.2
3.4
3.6
V
Center Voltage
VCVO
2.5V Reference
pin 71
-100
0
100
mV
VREF Current Drive Voltage 1
VCVO1
2.5V Reference
pin 71
-100
0
100
mV
VREF Current Drive Voltage 2
VCVO2
2.5V Reference
pin 71
-100
0
100
mV
Post CH1 Freq. Characteristic
Fpos1
SG1 2.5V+1Vp-p,40KHz,sine
pin 13
-4.5
-3.0
-1.5
dB
Post CH2 Freq. Characteristic
Fpos2
SG1 2.5V+1Vp-p,40KHz,sine
pin 12
-4.5
-3.0
-1.5
dB
Post CH1 Mute
Mute1
Mute=5V
SG1 2.5V+1Vp-p,1KHz,sine
pin13
-
-
-35
dB
Post CH2 Mute
Mute2
Mute=5V
SG1 2.5V+1Vp-p,1KHz,sine
pin 12
-
-
-35
dB
Focus Loop DC Gain
Gf
$08,SG2 DC 2.6V,2.4V average
pin 48
19.0
21.5
24.0
dB
Focus Off Offset
Vosf1
$00
pin 48
-100
0
100
mV
Focus On Offset
Vofs2
$08,DC 2.5V
pn 48
0
250
500
mV
Focus Auto Offset
Vaof
$842,WDCK,after100ms
pin 48
-65
0
65
mV
Table 3. Electrical Characteristics (Continued)
(Ta=25
∞
C, VDD = DVDD = VCC = +5V, VSS = DVSS = GND = VSSP = 0V )
Characteristic
Symbol
Test Conditions
Output
Min
Typ
Max
Unit
PRELIMINARY
RF AMP & SERVO SIGNAL PROCESSOR
11
KB9223 / KB9223-L
M/M-97-P006
1997. 10. 17
Focus Output Voltage H
Vfoh1
$08,DC 3.0V
pin 48
4.40
-
-
V
Focus Output Voltage L
Vfol1
$08,DC 2.0V
pin 48
-
-
0.60
V
Focus Output Drive Voltage H
Vfoh2
$08,DC 3.0V
pin 48
3.68
-
-
V
Focus Output Drive Voltage L
Vfol2
$08,DC 2.0V
pin 48
-
-
1.32
V
Focus Oscillation Voltage
Vosc
$08,DC2.5V
pin 48
0
100
200
mV
Focus Feed Through
Gff
Gain Difference at Servo on
and off
pin 48
-
-
-35
dB
Focus AC Gain 1
Gfa1
$08,
SG2 2.5V+0.1Vp-p,1.2KHz,sine
pin 48
19.0
23.0
27.0
dB
Focus AC Phase 1
Pfa1
$08,
SG2 2.5V+0.1Vp-p,1.2KHz,sine
pin 48
40
65
90
deg
Focus AC Gain 2
Gfa2
$08,
SG2 2.5V+0.1Vp-p,2.7KHz,sine
pin 48
14.0
18.5
23.0
dB
Focus AC Phase 2
Pfa2
$08,
SG2 2.5V+0.1Vp-p,2.7KHz,sine
pin 48
40
65
90
deg
Focus Search Voltage1
Vfs1
$30+$02
pin 48
-0.64
-0.50
-0.36
V
Focus Search Voltage2
Vfs2
$30+$03
pin 48
0.36
0.50
0.64
V
Focus Loop Total Gain
Gftg
Focus PD gain + Focus loop DC
gain
pin 48
49.5
51.5
53.5
dB
Tracking DC Gain
Gto
$25
SG2 DC 2.3V,2.7V average gain
pin 50
13.5
15.5
17.5
dB
Tracking Off Offset
Vost1
$20
pin 50
-100
0
100
mV
Tracking On Offset
Vost2
SG2 DC 2.5V,$25
pin 50
-100
0
120
mV
Tracking Oscillation Voltage
Vosa1
$25,SG2 DC2.5V
pin 50
0
100
200
mV
Tracking gain boost for ATSC
Gatsc
2.5V+0.1Vp-p,1KHz,sine
pin 50
17.5
20.5
23.5
dB
Tracking gain boost on LOCK (L)
Glock
2.5V+0.1Vp-p,1KHz,sine
pin 50
17.5
20.5
23.5
dB
Tracking Output Voltage H
Vth1
$25,SG2 DC 1.0V
pin 50
4.48
-
-
V
Tracking Output Voltage L
Vtl1
$25SG2 ,DC 4.0V
pin 50
-
-
0.52
V
Tracking Output Drive Voltage H
Vth2
$25,SG2 DC2.0V
pin 50
3.68
-
-
V
Tracking Output Drive Voltage L
Vtl2
$25, SG2 DC3.0V
pin 50
-
-
1.32
V
Tracking Jump Voltage 1
Vtj1
$2C
pin 50
-0.64
-0.5
-0.36
V
Tracking Jump Voltage 2
Vtj2
$28
pin 50
0.36
0.5
0.64
V
Tracking Feed Through
Gtf
Gain Difference at Tracking servo
on and off
pin 50
-
-
-39
dB
Tracking AC Gain 1
Gta1
$10,$25,SG2 2.5V+0.1Vp-p,
1.2KHz,sine
pin 50
9.0
12.5
16.0
dB
Table 3. Electrical Characteristics (Continued)
(Ta=25
∞
C, VDD = DVDD = VCC = +5V, VSS = DVSS = GND = VSSP = 0V )
Characteristic
Symbol
Test Conditions
Output
Min
Typ
Max
Unit
PRELIMINARY
RF AMP & SERVO SIGNAL PROCESSOR
12
KB9223 / KB9223-L
M/M-97-P006
1997. 10. 17
Tracking AC Phase 1
Pta1
$10,$25,SG2 2.5V+0.1Vp-p,
1.2KHz,sine
pin 50
-140
-115
-90
deg
Tracking AC Gain 2
Gta2
$10,$25,SG2 2.5V+0.1Vp-p,
2.7KHz,sine
pin 50
17.5
21.5
25.5
dB
Tracking AC Phase 2
Pta2
$10,$25,SG2 2.5V+0.1Vp-p,
2.7KHz,sine
pin 50
-195
-150
-100
deg
Tracking Loop Gain
Gtrt
tracking Amp F gain+ servo DC
gain
-
18.5
20.5
22.5
dB
Sled DC Gain
Gsl
SG2 DC 2.6V,2.4V
pin 43
20.5
22.5
24.5
dB
Sled Feed Through
Gslf
Gain Difference at sled servo
on and off
SG2 2.5V+0.1Vp-p,1.2KHz,sine
pin 43
-
-
-34
dB
Sled Output Voltage H
Vslh1
$25,SG2 DC 2.9V
pin 43
4.48
-
-
V
Sled Output Voltage L
Vsll1
$25,SG2 DC 2.1V
pin 43
-
-
0.52
V
Sled Output Drive Voltage H
Vslh2
$25,SG2 DC 2.9V
pin 43
3.68
-
-
V
Sled Output Drive Voltage L
Vsll2
$25,SG2 DC 2.1V
pin 43
-
-
1.32
V
Sled Forward Kick Voltage
Vsk1
$22
pin 43
0.38
0.60
0.75
V
Sled Reverse Kick Voltage
Vsk2
$23
pin 43
-0.75
-0.6
-0.38
V
Spindle Normal Speed Gain
Gsp
$F0
SG1 DC 2.6V,2.4V, average gain
pin 46
14.0
16.5
19.0
dB
Spindle Double Speed Gain
Gsp2
$F3
SG1 DC 2.6V,2.4V, average gain
pin 46
19.0
23.0
27.0
dB
Spindle Output Voltage H
Gsph1
$F0, SG1 DC 3.5V
pin 46
4.48
-
-
V
Spindle Output Voltage L
Gspl1
$F0, SG1 DC 1.5V
pin 46
-
-
0.52
V
Spindle Output Drive Voltage H
Gsph2
$F0,SG1 DC 3.5V
pin 46
3.68
-
-
V
Spindle Output Drive Voltage L
Gspl2
$F0,SG1 DC 1.5V
pin 46
-
-
1.32
V
Spindle AC Gain
Gspa
$F0,SG1 2.5V+0.2Vp-p,
2KHz,sine
pin 46
-7.0
-3.5
0
dB
Spindle AC Phase
Pspa
$F0,SG1 2.5V+0.2Vp-p,
2KHz,sine
pin 46
-120
-90
-60
deg
Table 3. Electrical Characteristics (Continued)
(Ta=25
∞
C, VDD = DVDD = VCC = +5V, VSS = DVSS = GND = VSSP = 0V )
Characteristic
Symbol
Test Conditions
Output
Min
Typ
Max
Unit
RF AMP & SERVO SIGNAL PROCESSOR
PRELIMINARY
14
KB9223 / KB9223-L
ELECTRONICS
M/M-97-P006
1997. 10 .17
FOCUS output voltage H
Vfh1l
VDD, DVDD, VCC = +3.4V
Low Voltage Test for Servo Part
& RF part
: the test method is the same as
5V test
pin 48
2.88
-
-
V
FOCUS output voltage L
Vfl1l
pin 48
-
-
0.68
V
FOCUS SEARCH voltage 1
Vfs1l
pin 48
-0.64
-0.50
-0.36
V
FOCUS SEARCH voltage 2
Vfs2l
pin 48
0.36
0.50
0.64
V
TRACKING on OFFSET
Vost21
pin 50
-100
0
+120
mV
TRACKING output voltage H
Vth1l
pin 50
2.88
-
-
V
TRACKING output voltage L
Vtl1l
pin 50
-
-
0.68
V
TRACKING jump voltage 1
Vtj1l
pin 50
-0.64
-0.50
-0.36
V
TRACKING jump voltage 2
Vtj2l
pin 50
0.36
0.50
0.64
V
SLED output voltage H
Vslh1l
pin 43
2.88
-
-
V
SLED output voltage L
Vsll1l
pin 43
-
-
0.68
V
SLED forward kick voltage
Vsk1l
pin 43
0.38
0.60
0.75
V
SLED reverse kick voltage
Vsk2l
pin 43
-0.75
-0.60
-0.38
V
SPINDLE output voltage H
Vsph1l
pin 46
2.88
-
-
V
SPINDLE output voltage L
Vspl1l
pin 46
-
-
0.68
V
RF amp OFFSET voltage
Vrfol
pin 74
-80
0
+80
mV
Tracking error offset
Vteol
pin 54
-50
0
+50
mV
RF amp output voltage H
Vrfpp1l
pin 74
2.8
-
-
V
RF amp output voltage L
Vrfpp2l
pin 74
-
-
0.6
V
FOCUS error output voltage H
Vfepp1l
pin 59
2.8
-
-
V
FOCUS error output voltage L
Vfepp2l
pin 59
-
-
0.6
V
Tracking error output voltage
Vtepp1l
pin 54
2.2
-
-
V
Tracking error output voltage
Vtepp2l
pin 54
-
-
1.2
V
APC output voltage 1L
Vapc1l
pin 70
-
-
1.2
V
APC output voltage 2L
Vapc2l
pin 70
2.5
-
-
V
APC output voltage 3L
Vapc3l
pin 70
2.5
-
-
V
APC output voltage 4L
Vapc4l
pin 70
-
-
1.2
V
APC output voltage 5L
Vapc5l
pin 70
-
-
1.1
V
APC output voltage 6L
Vapc6l
pin 70
2.7
-
-
V
FOK threshold voltage
Vfoktl
pin 40
-420
-360
-300
V
Post Filter Output Voltage max. 1
Vpom1
SG1 2.5V+3.2Vp-p,1KHz,
within THD 1%
pin 13
1.1
1.3
-
Vrms
Table 3. Electrical Characteristics (Continued)
(Ta=25
∞
C, VDD = DVDD = VCC = +5V, VSS = DVSS = GND = VSSP = 0V )
Characteristic
Symbol
Test Conditions
Output
Min
Typ
Max
Unit

PRELIMINARY
RF AMP & SERVO SIGNAL PROCESSOR
14
KB9223 / KB9223-L
M/M-97-P006
1997. 10. 17
Post Filter Output Voltage max. 2
Vpom2
SG1 2.5V+3.2Vp-p,1KHz,
within THD 1%
pin 12
1.1
1.3
-
Vrms
Total Harmonic Distoration 1
THD11
SG1 f=100Hz,0dBm
pin 13
-
0.01
0.05
%
Total Harmonic Distoration 1
THD12
SG1 f=1KHz,0dBm
pin 13
-
0.01
0.05
%
Total Harmonic Distoration 1
THD13
SG1 f=10KHz,0dBm
pin 13
-
0.05
0.1
%
Total Harmonic Distoration 1
THD14
SG1 f=16KHz,0dBm
pin 13
-
0.1
0.2
%
Total Harmonic Distoration 1
THD15
SG1 f=20KHz,0dBm
pin 13
-
0.1
0.2
%
Total Harmonic Distoration 2
THD21
SG1 f=100Hz,0dBm
Pin 12
-
0.01
0.05
%
Total Harmonic Distoration 2
THD22
SG1 f=1KHz,0dBm
Pin 12
-
0.01
0.05
%
Total Harmonic Distoration 2
THD23
SG1 f=10KHz,0dBm
Pin 12
-
0.05
0.1
%
Total Harmonic Distoration 2
THD24
SG1 f=16KHz,0dBm
Pin 12
-
0.1
0.2
%
Total Harmonic Distoration 2
THD25
SG1 f=20KHz,0dBm
Pin 12
-
0.1
0.2
%
Frequency Characteristics 1
fv11
SG1 f=100Hz,0dBm
pin 13
-0.1
0
0.1
dB
Frequency Characteristics 1
fv12
SG1 f=1KHz,0dBm
pin 13
-0.25
0
+0.25
dB
Frequency Characteristics 1
fv13
SG1 f=10KHz,0dBm
pin 13
-0.5
0
0.5
dB
Frequency Characteristics 1
fv14
SG1 f=16KHz,0dBm
pin 13
-1.0
0
1.0
dB
Frequency Characteristics 1
fv15
SG1 f=20KHz,0dBm
pin 13
-1.5
0
1.5
dB
Frequency Characteristics 2
fv21
SG1 f=100Hz,0dBm
Pin 12
-0.1
0
0.1
dB
Frequency Characteristics 2
fv22
SG1 f=1KHz,0dBm
Pin 12
-0.25
0
+0.25
dB
Frequency Characteristics 2
fv23
SG1 f=10KHz,0dBm
Pin 12
-0.5
0
0.5
dB
Frequency Characteristics 2
fv24
SG1 f=16KHz,0dBm
Pin 12
-1.0
0
1.0
dB
Frequency Characteristics 2
fv25
SG1 f=20KHz,0dBm
Pin 12
-1.5
0
1.5
dB
Crosstalk 1
CT11
SG1 100Hz,0dBm,ratio on Ch2
pin 13
70
80
-
dB
Crosstalk 1
CT12
SG1 1KHz,0dBm,ratio on Ch2
pin 13
65
75
-
dB
Crosstalk 1
CT13
SG1 10KHz,0dBm,ratio on Ch2
pin 13
60
65
-
dB
Crosstalk 2
CT21
SG1 100Hz,0dBm,ratio on Ch1
pin 12
70
80
-
dB
Crosstalk 2
CT22
SG1 1KHz,0dBm,ratio on Ch1
pin 12
65
75
-
dB
Crosstalk 2
CT23
SG1 10KHz,0dBm,ratio on Ch1
pin 12
60
65
-
dB
Characteristic
Symbol
Test Conditions
Output
Min
Typ
Max
Unit
Signal to Noise Ratio 1
S/N 1
DC 2.5V 0dbm,ratio on Noise
pin 13
73
80
-
dB
Signal to Noise Ratio 2
S/N 2
DC 2.5V 0dbm,ratio on Noise
pin 12
73
80
-
dB
Channel Balance
CB
Gain Difference Ch1 and Ch2
-
-0.1
0
+0.1
dB
Table 3. Electrical Characteristics (Continued)
(Ta=25
∞
C, VDD = DVDD = VCC = +5V, VSS = DVSS = GND = VSSP = 0V )
Characteristic
Symbol
Test Conditions
Output
Min
Typ
Max
Unit

PRELIMINARY
RF AMP & SERVO SIGNAL PROCESSOR
15
KB9223 / KB9223-L
M/M-97-P006
1997. 10. 17
Note1) The notation $ means hexa decimal of micom command
Note2) Low voltage test items only refer to KB9223-L
Post filter output voltage mix.1L
Vpom1L
VDD, DVDD, VCC
VCCP= +3.4V
Low voltage test for post filter.
The test method is the same as
5V test except for input signal
: SG1 1.7V + 1.55Vp-p
pin 13
0.5
0.55
-
Vrms
Post filter output voltage mix. 2L
Vpom2L
pin 12
0.5
0.55
-
Vrms
Total harmonic distortion 1L
THD11L
pin 13
-
0.01
0.05
%
Total harmonic distortion 1L
THD12L
pin 13
-
0.01
0.05
%
Total harmonic distortion 1L
THD13L
pin 13
-
0.05
0.1
%
Total harmonic distortion 1L
THD14L
pin 13
-
0.1
0.2
%
Total harmonic distortion 1L
THD15L
pin 13
-
0.1
0.2
%
Total harmonic distortion 2L
THD21L
pin 12
-
0.01
0.05
%
Total harmonic distortion 2L
THD22L
pin 12
-
0.01
0.05
%
Total harmonic distortion 2L
THD23L
pin 12
-
0.05
0.1
%
Total harmonic distortion 2L
THD24L
pin 12
-
0.1
0.2
%
Total harmonic distortion 2L
THD25L
pin 12
-
0.1
0.2
%
Frequency Characteristics 1L
fv11L
pin 13
-0.1
0
0.1
dB
Frequency Characteristics 1L
fv12L
pin 13
-0.25
0
+0.25
dB
Frequency Characteristics 1L
fv13L
pin 13
-0.5
0
0.5
dB
Frequency Characteristics 1L
fv14L
pin 13
-1.0
0
1.0
dB
Frequency Characteristics 1L
fv15L
pin 13
-1.5
0
1.5
dB
Frequency Characteristics 2L
fv21L
pin 12
-0.1
0
0.1
dB
Frequency Characteristics 2L
fv22L
pin 12
-0.25
0
+0.25
dB
Frequency Characteristics 2L
fv23L
pin 12
-0.5
0
0.5
dB
Frequency Characteristics 2L
fv24L
pin 12
-1.0
0
1.0
dB
Frequency Characteristics 2L
fv25L
pin 12
-1.5
0
1.5
dB
Cross talk 1L
CT11L
pin 13
67
80
-
dB
Cross talk 1L
CT12L
pin 13
62
75
-
dB
Cross talk 1L
CT13L
pin 13
57
65
-
dB
Cross talk 2L
CT21L
pin 12
67
80
-
dB
Cross talk 2L
CT22L
pin 12
62
75
-
dB
Cross talk 2L
CT23L
pin 12
57
65
-
dB
Signal to noise ratio 1L
S/N1L
pin 13
67
80
-
dB
Signal to noise ratio 2L
S/N2L
pin 12
67
80
-
dB
Channel balance L
CBL
-
-0.1
0
+0.1
dB
Table 3. Electrical Characteristics (Continued)
(Ta=25
∞
C, VDD = DVDD = VCC = +5V, VSS = DVSS = GND = VSSP = 0V )
Characteristic
Symbol
Test Conditions
Output
Min
Typ
Max
Unit
PRELIMINARY
RF AMP & SERVO SIGNAL PROCESSOR
16
KB9223 / KB9223-L
M/M-97-P006
1997. 10. 17
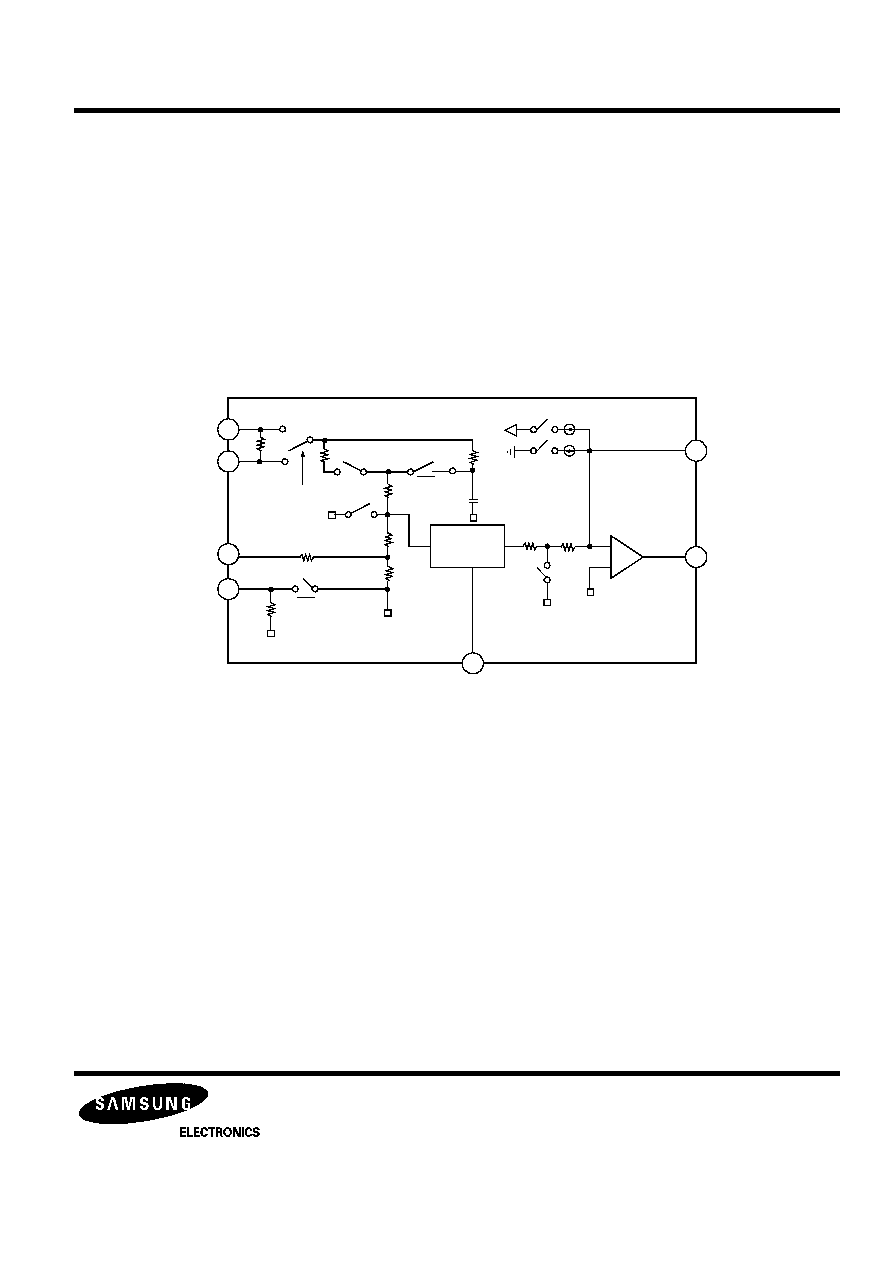
TEST CIRCUIT
Figure 3. Test Circuit
1
2
3
4
5
6
7
8
9
1
0
1
1
1
2
1
3
1
4
1
5
1
6
1
7
1
8
1
9
2
0
2
1
2
2
2
3
2
4
2
5
2
6
2
7
2
8
2
9
3
0
3
1
3
2
3
3
3
4
3
5
3
6
3
7
3
8
3
9
4
0
6
4
6
3
6
2
6
1
6
0
5
9
5
8
5
7
5
6
5
5
5
4
5
3
5
2
5
1
5
0
4
9
4
8
4
7
4
6
4
5
4
4
4
3
4
2
4
1
8
0
7
9
7
8
7
7
7
6
7
5
7
4
7
3
7
2
7
1
7
0
6
9
6
8
6
7
6
6
6
5
K
B
9
2
2
3
MCP
DCB
FRSH
DCC2
DCC1
FSET
VDDA
VCCP
GC2I
GC2O
CH2I
CH2O
CH1O
CH1I
GC1O
GC1I
RRC
VSSP
MUTEI
ISET
VREG
WDCK
SMDP
SMON
S
M
E
F
F
L
B
F
S
3
F
G
D
L
O
C
K
T
R
C
N
T
I
S
T
A
T
A
S
Y
E
F
M
V
S
S
A
M
C
K
M
D
A
T
A
M
L
T
R
E
S
E
T
M
I
R
R
O
R
F
O
K
DVEE
FEBIAS
TG2
TGU
FDFCT
FE1
FE2
TDFCT
DVDD
LPFT
TE1
TE2
TZC
ATSC
TEO
TE-
FEO
FE-
SPDLO
SPDL-
SL-
SLO
SL+
SSTOP
G
N
D
E
I
E
Q
C
R
F
I
E
Q
O
I
R
F
R
F
O
R
F
-
V
C
C
V
R
L
D
P
D
E
F
P
D
2
P
D
1
+
+
+
+
+
+
+
D
C
S
G
3
A
C
S
W
3
0
1
0
K
1
0
K
3
9
0
K
3
9
0
K
S
W
3
1
S
W
3
2
S
W
3
3
3
K
3
K
0
.
5
K
0
.
5
K
S
W
3
4
S
W
3
5
S
W
3
6
S
W
3
7
S
W
3
8
+
3
3
U
F
S
W
-
V
C
2
P
F
2
2
K
0
.
0
1
U
F
S
W
3
9
S
W
4
0
S
W
4
1
S
G
4
D
C
A
C
+
S
W
4
2
3300PF
1000PF
SW4
+
4.7UF
3
3
0
0
P
F
0.01PF
510K
2
7
K
1
0
P
F
27K
4.7UF
SW1
SWP1
0.001UF
5
.
6
K
5
.
6
K
5.6K
3
3
0
P
F
3
3
0
P
F
5
.
6
K
5
.
6
K
5.6K
3.3UF
3.3UF
10K
10K
2
7
K
1
0
P
F
27K
SW2
+
4.7UF
4.7UF
A
C
D
C
S
G
1
SWP2
SW3
240K
0.1UF
+
SW5
SW6
SW7
SG-D1
1
0
0
0
P
F
S
W
8
S
W
9
S
G
-
D
2
0
.
0
1
U
F
S
W
1
0
S
W
1
1
1
1
K
S
G
-
D
3
S
G
-
D
4
S
G
-
D
5
S
G
-
D
6
S
G
-
D
7
S
G
-
D
8
VECTOR_TEST_IN
V
E
C
T
O
R
_
T
E
S
T
_
I
N
V
E
C
T
O
R
_
T
E
S
T
_
O
U
T
V
E
C
T
O
R
_
T
E
S
T
_
O
U
T
V
E
C
T
O
R
_
T
E
S
T
_
I
N
V
E
C
T
O
R
_
T
E
S
T
_
I
N
V
E
C
T
O
R
_
T
E
S
T
_
I
N
V
E
C
T
O
R
_
T
E
S
T
_
I
N
V
E
C
T
O
R
_
T
E
S
T
_
I
N
V
E
C
T
O
R
_
T
E
S
T
_
I
N
VECTOR_TEST_IN
SG_D12
SW13
SW14
S
W
1
5
0.25K
60K
13K 1
2
5K
0.25K
13K 1
2
S
W
1
6
S
W
1
7
S
W
1
9
0.25K
13K 1
2
0.25K
13K 1
2
SW21
SW22
SW23
SG-_D10
SG-_D11
VERTOR_TEST_IN
VERTOR_TEST_IN
SW24
SW25
SW26
0.01UF
A
C
D
C
S
G
2
VERTOR_TEST_IN
SW27
0.01UF
SW28
SW29
96K
VCC(5V)
VC(2.5V)
GND(0V)
100K
200K
100K
200K
100K
S
W
1
8
S
W
2
0
1
u
F

PRELIMINARY
RF AMP & SERVO SIGNAL PROCESSOR
17
KB9223 / KB9223-L
M/M-97-P006
1997. 10. 17
FUNCTION DESCRIPTION
1.RF Amp Block
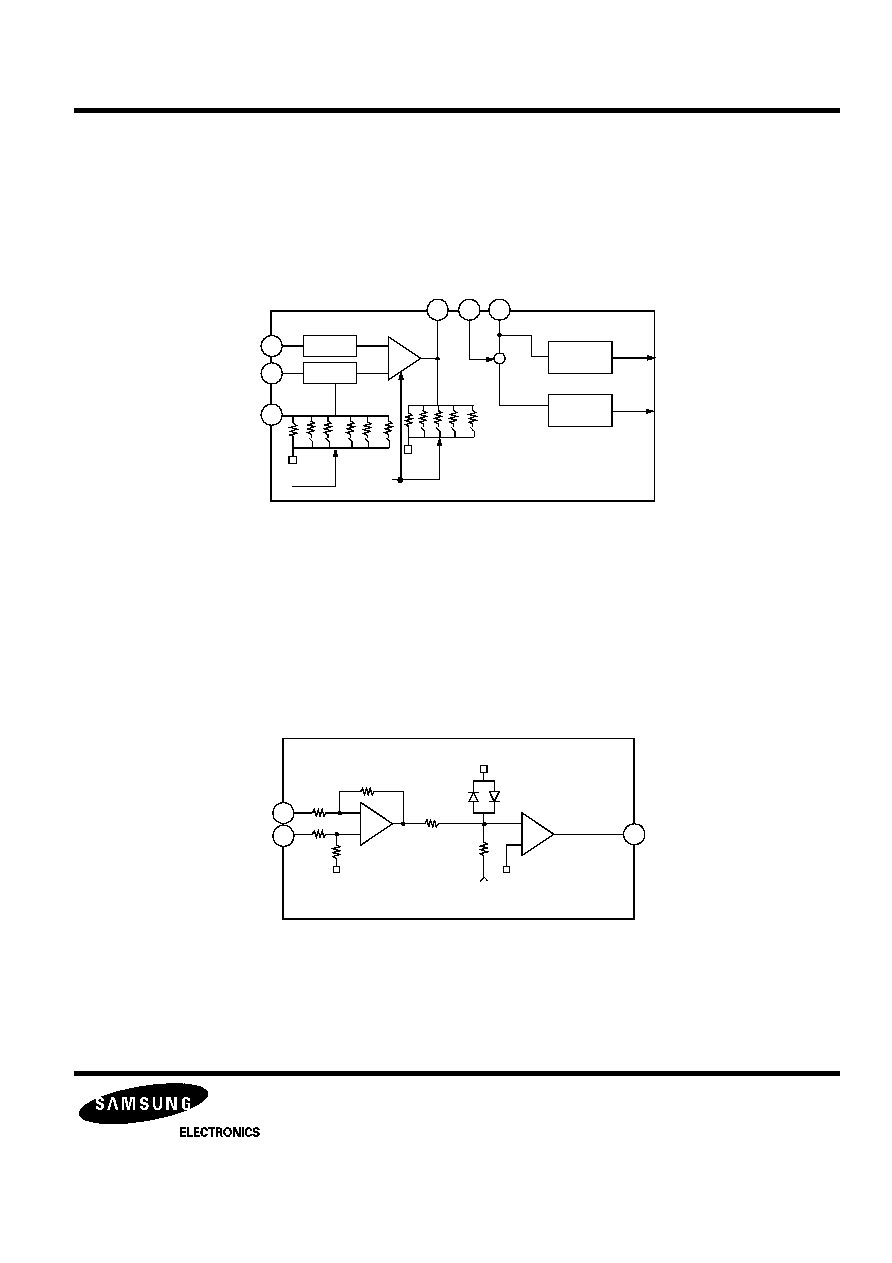
1.1 RF Amplifier
The optical currents inputted through pins PD1(A+C) and PD2(B+D) are converted into voltages through
I-V amp, and they are added to RF summing amp. The voltage, converted from the photo diode
(A+B+C+D) signal, is outputted through RFO(pin74) and the eye pattern can be checked at this pin.
Figure 4. RF amp circuit
1.2 Focus Error Amp
The output of the focus error amp is the difference between I-V amp(1) output VA and
RF I-V amp(2) output VB. The focus error bias voltage applied to the (+) of focus error amp can be
changed by output voltage of D/A converter as shown in diagram, so that the offset of focus error amp
can be adjusted automatically by controlling 5 bits counter switches. Focus error bias can be adjusted
from the range of +100mV ~ -100mV by connecting the resistor on pin 63 (FEBIAS).
Figure 5. Focus error amp circuit
note1> VA and VB refer to output signal of PD1 and PD2 I/V amp.
note2> sev-stopb,sev-stop,fe-stopb and fcmpo are internal signals
65
66
-
+
-
+
74
-
+
73
PD1
PD2
RFO
RF-
58K
10K
VA
I-V amp(1)
VC
58K
10K
VB
I-V amp(2)
VC
VC
RF summing amp
63
-
+
59
-
+
-
+
sev-stopb
FEBIAS
sev-stop
32K
32K
<5 Bit Counter>
3K
X1
X2
X4
X8
X16
164K
FE1
160K
4K
fcmpo
vc
FEBIAS
fe-stopb
SW1
VB >
VA >
fe-stopb
PRELIMINARY
RF AMP & SERVO SIGNAL PROCESSOR
18
KB9223 / KB9223-L
M/M-97-P006
1997. 10. 17
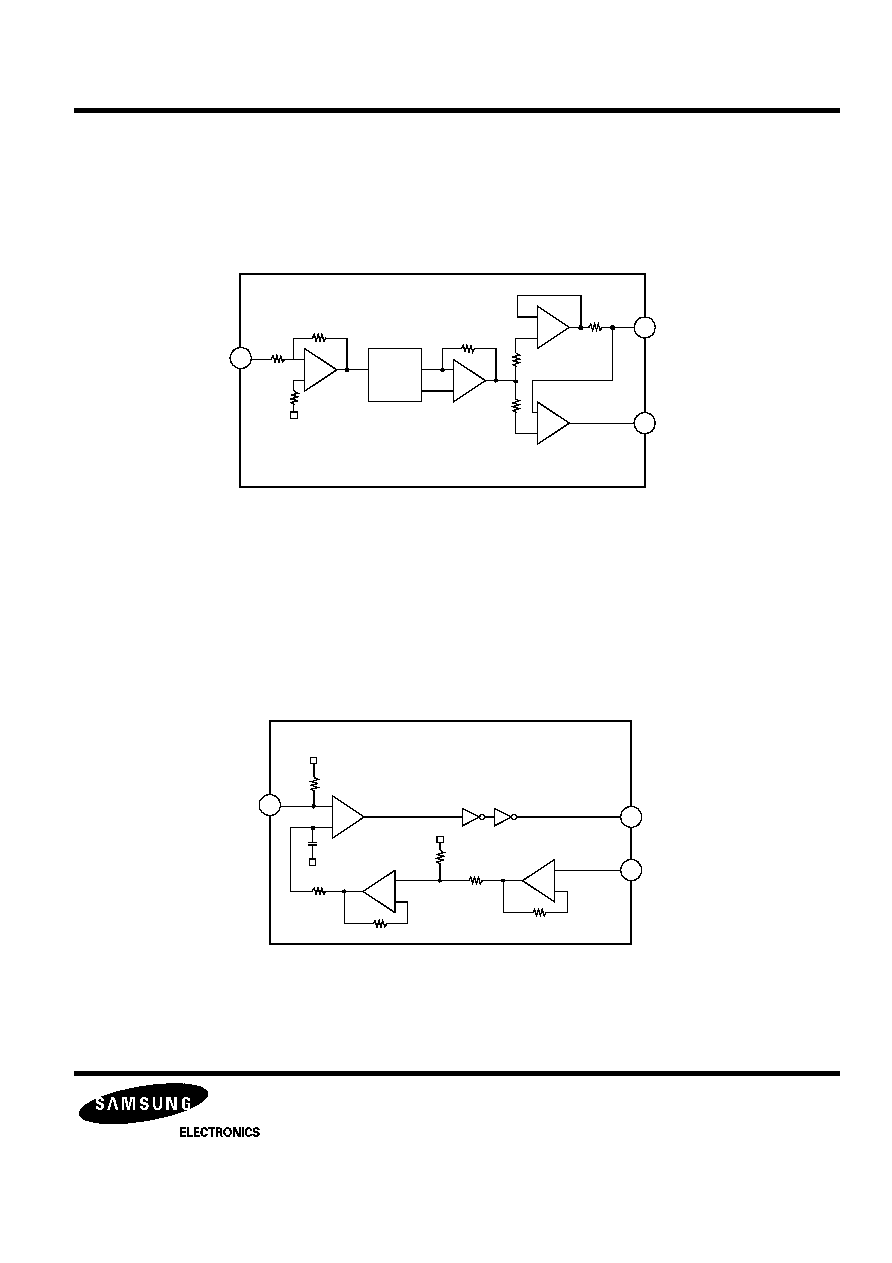
1.3 Tracking Error Amp
The optical currents detected from the side photo diode (E and F) pf pick-up are inputted to the E and F
pin and converted into voltage signals by E I-V and F I-V amp. The output of tracking error amp
generates the difference between E I-V AMP and F I-V AMP voltage output.
The E-F balance can be adjusted by modifying the gain of E I-V AMP, and the tracking gain
can be adjusted automatically by controlling the peak voltage at pin TE2 by micom program.
Figure 6. Tracking error amp circuit
1.4 Focus OK Circuit
The FOK is the output. The focus OK circuit generates a timing window to enable focus servo operation
from focus search status. When the difference of the RFO (pin74)signal and DC coupled signal
IRF(pin75) are above the predefined voltage the Focus OK circuit output (pin40) becomes active(High
output). The predefined voltage is -0.39V
Figure 7. Focus OK circuit
67
-
+
68
79
I-V AMP
I-V AMP
54
55
Balance
F
E
EI
GAIN_UP/DOWN
BAL < 4 : 0 >
GAIN < 3 : 0 >
TE1
LPFT
To ISTAT
1
3
K
7
5
K
2
2
0
K
1
1
0
K
5
6
K
2
7
K
1
3
K
1
6
K
7
.
5
K
3
.
3
K
1
.
5
K
-
53
TE2
Window Comp
Gain
Window Comp
To ISTAT
To TRCNT
74
75
-
+
-
+
40
RFO
IRF
FOK
40K
40K
40K
57K
90K
VC+0.625V
PRELIMINARY
RF AMP & SERVO SIGNAL PROCESSOR
19
KB9223 / KB9223-L
M/M-97-P006
1997. 10. 17
1.5 Mirror Circuit
IRF signal is amplified by the mirror amp, and the peak and bottom component of amplified signal are
detected by peak and bottom hold circuit. The peak hold circuit covers traverse signal of up to 100KHz
component and bottom hold circuit capable of covering the envelope frequency of disc rotation. The time
constant for the mirror hold must be sufficiently larger than that of the traverse signal.
Figure 8. Mirror Circuit
1.6 EFM Comparator
The EFM comparator converts a RF signal into a binary signal.
Beacuse the asymmetry generated due to variations in disc manufacturing can not be eliminated by the
AC coupling alone, this circuit uses to control reference voltage of EFM comparator for eliminating
asymmetry.
Figure 9. EFM Comparator & asymmetry circuit
75
-
+
1
IRF
Peak and
Bottom
Hold
-
+
39
-
+
-
+
17K
38K
19K
2.5K
96K
17K
1.5K
MIRROR
MCP
77
1
RFI
39
-
+
ASY
EFM
-
+
-
+
40K
19K
100K
100K
20K
85K

PRELIMINARY
RF AMP & SERVO SIGNAL PROCESSOR
20
KB9223 / KB9223-L
M/M-97-P006
1997. 10. 17
1.7 Defect Circuit
The RFO signal bottom, after being inverted, is held with two time constants of long and short.
The short time-constant bottom hold is done for a disc mirror defect more than 0.1msec, the long time-
constant bottom hold is done with the mirror level prior to the defect. By differentiating this with a
capacitor coupling and shifting the level, both signals are compared to generate the mirror defect
detection signal.
Figure 10. Defect Circuit
1.8 APC (Auto Power Control) Circuit
The laser diode has large negative temperature characteristic in its optical output when driven with a
constant current on laser diode. Therefore, the output on processing monitor photo diode, must be a
controlled current for getting regular output power, thus the APC (Auto Power Control) circuit is
composed.
Figure 11. APC Circuit
75
RFO
41
-
+
SSTOP/DFCT
2
BOTTOM
HOLD
5
-
+
4
DCC1
DCC2
DCB
75K
37.5K
28K
75K
VC+0.6254V
43K
DFCT
BOTTOM
HOLD
69
PD
70
-
+
LD
-
+
43.5K
150K
5.5K
150K
150K
PN (From micom command)
300K
LDON
0.75K
(From micom command)
1.25V
PRELIMINARY
RF AMP & SERVO SIGNAL PROCESSOR
21
KB9223 / KB9223-L
M/M-97-P006
1997. 10. 17
1.9 AGC Stability Circuit
The AGC block is the function used to maintain the constant level of RF peak to peak voltage. After the
operation of RF envelop detection and comparing with reference voltage, RFO level is kept stable in 1Vp-
p, and inputted to EFM Slice.
Figure 12. AGC block
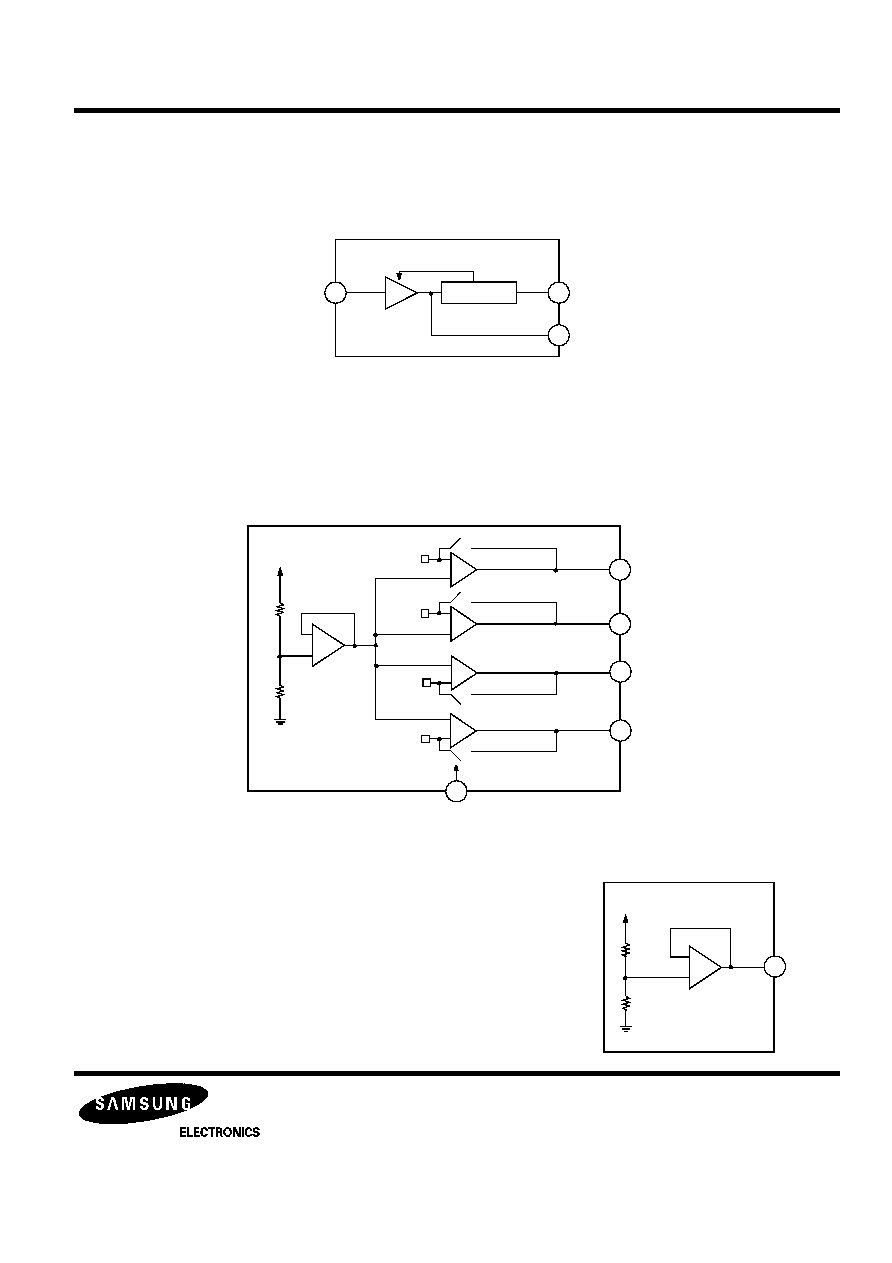
1.10 Post Filter
The adjustment of audio output gain and the integration of possible de-emphasis output are executed by
this circuit. This block has amps of 2 channel for gain and filter setting and mute pin for audio signal
muting.
Figure 13. Post Filter circuit
1.11 Center Voltage Generation Circuit
The center voltage is generated by voltage
divide using resistor .
Figure 14.
75
VCA
EQUALIZE
78
76
IRF
EQC
EQO
-
+
-
+
12
-
+
10
-
+
15
-
+
13
19
25K
25K
CH2I
GC2I
GC1I
CH1I
CH2O
GC2O
GC1O
CH1O
MUTEI
VCC
-
+
VR
30K
30K
VCC
71
Center Voltage
Generation Circuit

PRELIMINARY
RF AMP & SERVO SIGNAL PROCESSOR
22
KB9223 / KB9223-L
M/M-97-P006
1997. 10. 17
2.Servo Block
2.1 Focus Servo Block
When defect is "H"(the defect signal is detected), the focus servo loop is muting in case of focus phase
compensation. At this time, the focus error signal is outputted through the low pass filter formed by
connecting a capacitor(0.1uF) and a built-in 470K
resistor to the FDFCT pin(pin 60). Accordingly, the
focus error output is held at the error value just before defect error during defect occurring. The peak
frequency of focus loop phase compensation is at about 1.2KHz when the resistor connected to FSET
pin(pin 6) is 510K
, and it is inversely proportional to the resistor connected to the FSET pin. While the
focus search is operating, the FS4 switch is on and then the focus error signal is isolated, accordingly the
focus search signal is outputted by FEO pin(pin 48). When the FS2 switch is on(focus on), the focus
servo loop is on and the focus error signal from FE2 pin(pin 58) is outputted through the focus servo loop.
Figure 15. Focus servo block
58
-
+
60
28
27
Focus Phase
Compensation
26
47
-
+
-
+
-
+
-
+
3
3.6K
60K
FZCI
FE2
470K
DFCTI
20K
48K
FS4B
130K
FGD
FS3
46K
580K
FS3
4
7
0
K
40K
FS2B
FLB
FRCH
50K
10K
3.6K
FS1
92K
40K
FE-
FEO
VC
FSCMPO
48
FDFCT
PS
4 3
X1
X2
X3
X4
0 0
0 1
1 0
1 1
6
FSET
X1
X2
X3
X4
PRELIMINARY
RF AMP & SERVO SIGNAL PROCESSOR
23
KB9223 / KB9223-L
M/M-97-P006
1997. 10. 17
2.2 Tracking Servo Block
During detection of defect, the tracking error signal is outputted through the tracking servo loop after
passing the low pass filter formed by connecting a capacitor(0.1uF) and a built-in 470K
resistor to the
TDFCT pin(pin57) in case of tracking phase compensation. The value of tracking gain up/down can be
controlled by TGU and TG2 pin. The peak frequency of tracking loop phase compensation, the dynamic
range and offset of opamp can be adjusted by changing the value of resistor connected to FSET pin
same as focus loop. In case of unstable status of actuator after jumping, the ON/OFF of tracking loop is
controlled by TM7 switch of break circuit.
After 10-track jumping, servo circuit gets out of the liner range and actuator's tracking becomes
occasionally unstable. Hence unnecessary jumping with many tracking error should be prevented.
Figure 16. Tracking servo block
-
+
53
57
61
62
TRACKING
PHASE
COMPENSATION
49
50
TE2
470K
TDFCT
680K
TGU
TG2
470K
20K
10K
110K
82K
680K
66PF
10K
90K
FSET
TE-
TG1
TG1
TM1
TG2
TM7
TM3
TM4
DFCTI
6
TEO

PRELIMINARY
RF AMP & SERVO SIGNAL PROCESSOR
24
KB9223 / KB9223-L
M/M-97-P006
1997. 10. 17
2.3 Sled Servo Block
The moving of pick-up is controlled by tracking servo output through a low pass filter.
The sled kick voltage is outputted for track jump operation.
Figure 17. Sled servo block
2.4 Spindle Servo Block
The 20K
resistor and 0.33uF capacitor form the 200Hz low pass filter, and the carrier component of
spindle servo error signals is eliminated. In CLV-S mode, SMEF becomes "L" and pin 25 low pass filter fc
lowers, strengthening the filter further. The characteristics of high frequency phase compensation in
focus tracking servo and the characteristics of cut off frequency in CLV low pass filter are tested by FSET
pin.
Figure 18. Spindle servo block
-
+
43
44
42
PS
4 3
X 1
X 2
X 3
X 4
0 0
0 1
1 0
1 1
SLO
SL-
SL+
TM6
TM7
TM2
-
+
24
46
45
23
25
-
+
6
SMON
SMDP
22K
22K
15K
20K
15K
220K
220K
220K
220K
50K
100K
SMEF
FSET
SPDL-
SPDLO
Double
speed

PRELIMINARY
RF AMP & SERVO SIGNAL PROCESSOR
25
KB9223 / KB9223-L
M/M-97-P006
1997. 10. 17
3.Digital Block
3.1 Description
Digital block is transferred serial data by micom and 8-bit serial data is converted to parallel data by
serial to parallel register. This data is decoded by latch signal. The status output of focus servo,track-
ing servo,and sled servo system,etc is determined by each data. The auto-sequence function process
2~4 micom command by one auto-sequence command.
Figure 19. CPU serial interface timing chart
Table 4.
CPU serial interface timing characteristics
Item
Symbol
Min
Typ
Max
Unit
Clock Frequency
fck
-
-
1
MHz
Clock Pulse Width
fwck
500
-
-
ns
Hold Time
tsu
500
-
-
ns
Setup Time
tn
500
-
-
ns
Delay Time
td
500
-
-
ns
Latch Pulse Width
twl
1000
-
-
ns
MDATA
MCK
twck
twck
tsu
tsn
D0
D1
D2
D3
D4
D5
D6
D7
MLT
twl
td

PRELIMINARY
RF AMP & SERVO SIGNAL PROCESSOR
26
KB9223 / KB9223-L
M/M-97-P006
1997. 10. 17
3.2 Micom Command Set
Table 5. Servo control command set
Item
Hexa
Address
Data
ISTA
TOUT
D7
D6
D5
D4
D3
D2
D1
D0
Focus Con-
trol
$0X
0
0
0
0
FS4
Focus On
FS3
Gain Down
FS2
Search On
FS1
Search Up
FZC
Tracking
Control
$1X
0
0
0
1
Anti Shock
Brake On
TG2
Gain Set
TG1
Gain Set
A.S
Tracking
Mode
$2X
0
0
1
0
Tracking Mode
Sled Mode
TZC
Select
$3X
0
0
1
1
PS4
Focus
Search+2
PS3
Focus
Search+2
PS2
Sled Kick+2
PS1
Sled Kick+1
STOP
Auto
Sequence
$4X
0
1
0
0
AS3
AS2
AS1
AS0
/
BUSY
R
A
M
S
E
T
Blind/
over-
flow
$5X
0
1
0
1
0.18ms
0.09ms
0.045ms
0.022ms
Hi-Z
Break
0.36ms
0.18ms
0.09ms
0.045ms
Kick
$6X
0
1
1
0
11.6ms
5.80ms
0.09ms
0.045ms
2N
jump
$7X
0
1
1
1
64
32
16
8
move
(M)
128
64
32
16
Auto Adj.
$8XX
1
0
0
0
Offset,Balance,Gain,APC Control
-
Speed
$FX
1
1
1
1
$F0:Normal Speed, $F3:Double Speed
-

PRELIMINARY
RF AMP & SERVO SIGNAL PROCESSOR
27
KB9223 / KB9223-L
M/M-97-P006
1997. 10. 17
3.2.1 Focus Control($0X)
This command consists of 8 bits data and expressed by two hexa $0X.
FS4,FS3,FS2,FS1:internal switch for focus control
-Focus Search Operation(FS2,FS1)
$02:FS2 switch become off and the value of servo output pin is as below.
(10uA-5uA)*50k*(feedback Resistor/50k)
$03:If FS1 switch is 1, the current supply is cut off and the discharge is performed.
The waveform is as below and the time constant is determined by internal resistor 50K
and external capacitor.
Figure 20. Waveform at pin 3 when FS1 is switched from 0 to 1
The waveform of servo output pin according to FS1 and FS2 switches is as below.
Figure 21. Focus search waveform at pin 48 by $02 and $03
FS4 is switch for on/off control of focus servo loop
$00:Focus servo off
$08:Focus servo on
D7
D6
D5
D4
D3
D2
D1
D0
ISTAT
0
0
0
0
FS4
FS3
FS2
FS1
FZC
0V
$00
02
03
02
03
02
03
00
PRELIMINARY
RF AMP & SERVO SIGNAL PROCESSOR
28
KB9223 / KB9223-L
M/M-97-P006
1997. 10. 17
3.2.2 Tracking Control($1X)
This command is used for tracking loop gain control, break circuit and anti-shock on/off control.
TG2 and TG1 are internal switch for tracking gain set.
3.2.3 Tracking mode($2X)
This command is used for tracking and sled servo on/off and jump for searching track.
<Tracking control & Sled control>
3.2.4 Peak value set($3X)
This command is used for the peak value setting of focus search and sled kick .
D0,D1:Sled kick
D2,D3:Focus search peak value
3.2.5 Auto Sequencer command($4X)
This command is used for reducing control time and replacing several command by one auto- sequence
command.
∑Auto sequencer mode is performed from the first falling edge of WDCK clock after the falling of
the latch pulse.
∑Auto sequencer does not carry out tracking gain up,brake,anti-shock and focus gain down.
∑Micom checks ISTAT pin(/BUSY) and sends to $40 command to reset preceding auto
sequencer status
D7
D6
D5
D4
D3
D2
D1
D0
ISTAT
0
0
0
1
Anti
shock
on/off
Break
circuit
on/off
TG2
TG1
Anti
shock
D7
D6
D5
D4
D3
D2
D1
D0
ISTA
T
0
0
1
0
Tracking control
Sled control
TZC
D3
D2
Tracking mode
D1
D0
Sled mode
0
0
Tracking servo off
0
0
Sled servo off
0
1
servo on
0
1
servo on
1
0
Forward jump
1
0
Forward kick
1
1
Reverse jump
1
1
Reverse kick

PRELIMINARY
RF AMP & SERVO SIGNAL PROCESSOR
29
KB9223 / KB9223-L
M/M-97-P006
1997. 10. 17
3.2.6 RAM Set($5X~$7X)
The value of RAM set is somewhat different to the actual count and the initial value is like below
4.Auto Adjustment Command
This command is used for auto control of offset,balance,gain adjustment and reference voltage setting. .
This command is also in control of on/off and sub type of laser diode and test or set mode.
4.1 Tracking balance ($800~$81F)
Table 6. Auto sequence command
Hexa
AS3
AS2
AS1
AS0
Remark
Cancel
$40
0
0
0
0
Reset
Auto focus
$47
0
1
1
1
-
1 Track jump
$48
$49
1
1
0
0
0
0
0
1
Forward
Reverse
10 Track
jump
$4A
$4B
1
1
0
0
1
1
0
1
Forward
Reverse
2N track jump
$4C
$4D
1
1
1
1
0
0
0
1
Forward
Reverse
M track move
$4E
$4F
1
1
1
1
1
1
0
1
Forward
Reverse
Table 7. RAM set table
Item
Initial value
actual count value
Blind
$55
Set value +4~5 WDCK clock
overflow, Brake
Set value +3 WDCK clock
Kick
$67
Set value +5 WDCK clock
2N ,M Track jump
$7E
Set value +3 WDCK clock
Item
Hexa
Data(5bits)
initial value
ISTAT(pin31)
TRCNT(pin30)
Tracking balance
$800~$81F
D4~D0
$81F
BAL
TRCNT
PRELIMINARY
RF AMP & SERVO SIGNAL PROCESSOR
30
KB9223 / KB9223-L
M/M-97-P006
1997. 10. 17
4.2 Tracking gain ($820~$83F)
4.3 Tracking balance & gain window level setting
∑The tracking balance and gain window level is set by D2,D3 data and the value has two
kinds of window levels set
4.3.1 Tracking balance window level
4.3.2 Tracking gain window level
4.4 Focus loop offset adjustment start command($841,$842)
This command is used for adjusting focus error bias and removing focus servo offset.
This command is executed during laser diode off.
4.5 APC circuit operation and Interruption on/off setting condition($85X)
This command is used for setting of laser diode on/off ,sub type(P_sub or N_sub) of laser diode and
interruption countermeasure circuit on/off.
Item
Hexa
Data(5bits)
initial value
ISTAT(pin31)
TRCNT(pin30)
Tracking gain
$820~$83F
D4~D0
$820
GAIN
TGL
Item
Hexa
D3
D2
D1
D0
initial value
window level setting
$84X
gain
balance
0
0
$840
D2 data
0
1
Tracking balance window level
-10~+15mV
-20~+20mV
D3 data
0
1
Tracking gain window level
250~400mV
150~300mV
Hexa command
meaning
$841
Focus error bias adjustment start command
$842
Focus servo offset cancel adjustment start command
Item
Hexa
D3
D2
D1
D0
initial value
APC &
Interruption on/off
condition
$85X
LD on/off
0 : On
1 : Off
Sub-type
0:N_sub
1:P_sub
Interruption ON/OFF
and time setting
$858

PRELIMINARY
RF AMP & SERVO SIGNAL PROCESSOR
31
KB9223 / KB9223-L
M/M-97-P006
1997. 10. 17
4.5.1 Time setting for Interruption countermeasure circuit on/off
4.6 Focus servo offset reset command and set mode command (86X)
This command is used for set and release before focus servo loop offset adjustment and
mode change.
(note1) The set mode command is sent by micom right after tracking gain is tuned.
(note2) The ISTAT pin is outputted the internal status of $00 ~ $7X command.
4.7 Direct command(DIRC) and focus bias reset command($87X)
This command is used for direct 1 track jump on/off setting and focus bias adjustment set and
release
D1
D0
Meaning
0
0
Countermeasure circuit on for all mirror signal
0
1
Countermeasure circuit on up to 20KHz mirror signal
1
0
Countermeasure circuit off
1
1
Countermeasure circuit on up to 10KHz mirror signal
Item
Hexa
D3
D2
D1
D0
Set mode
&
focus servo offset
reset command
$86X
0:offset
release
1:offset
reset
option
(Pin41 output)
0:Defect
1:SSTOP
1
1
Item
Hexa
D3
D2
D1
D0
DIRC
&
focus bias reset
$87X
0:DIRC On
1:DIRC Off
0:reset
1:reset
release
X
X

PRELIMINARY
RF AMP & SERVO SIGNAL PROCESSOR
32
KB9223 / KB9223-L
M/M-97-P006
1997. 10. 17
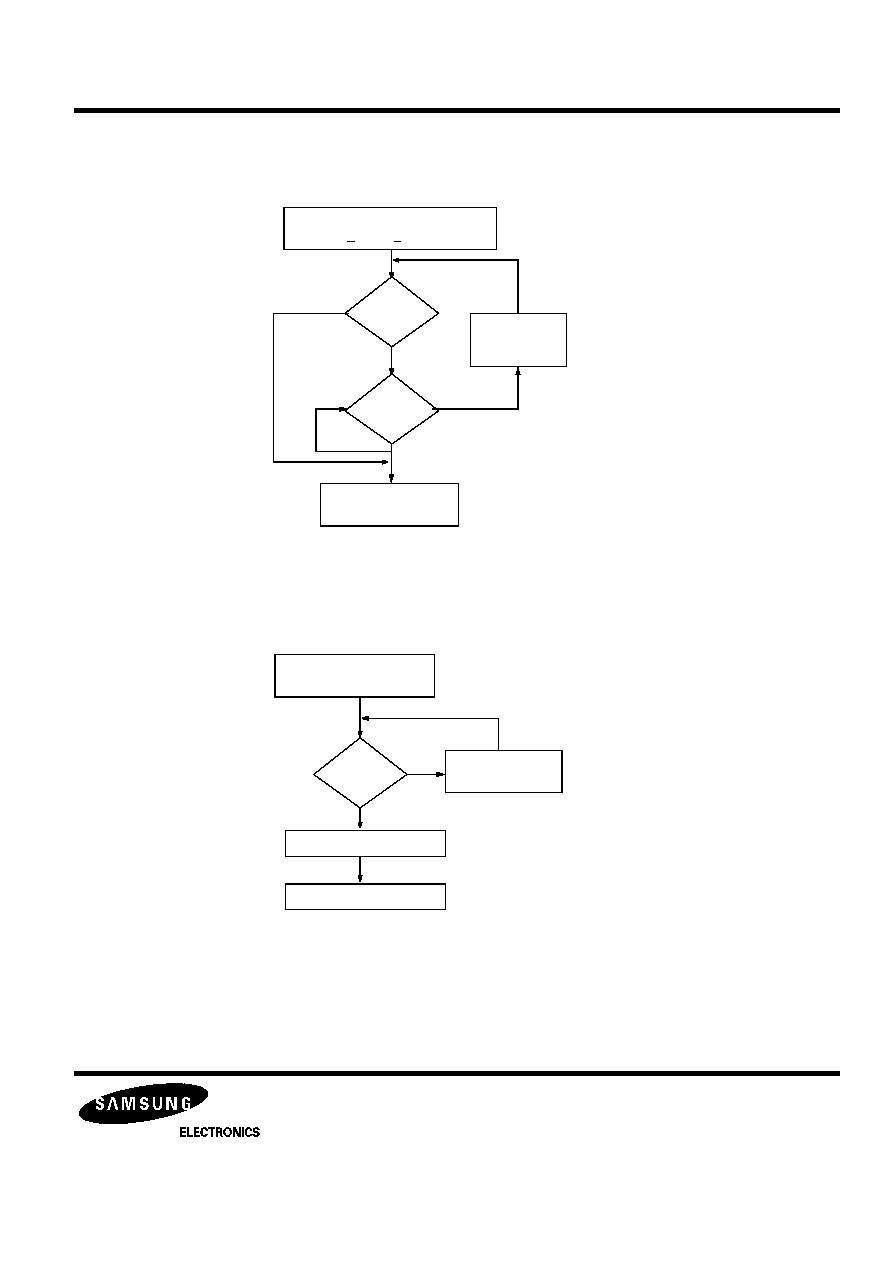
5.The Example of Adjustment Free Algorithm
5.1 Focus Error Bias & Servo Offset Cancel Adjustment
Figure 22. Focus error bias & servo offset cancel adjustment flow chart
Focus_RF_Offset Adjustment
[Command:841]
ISTAT
Check
L--> H
Finish
[RF CNT value Latch]
Focus_Servo_Offset Adjust-
ment [Command:842]
ISTAT
Check
L--> H
Finish
[Servo value Latch]
yes
Increment Count
no
Increment Count
no
yes
Time
Max 100msec
Time
Max 100msec
5bit Counter
17mV/Bit
Tuning range : + 260mV
4bit Counter
40mV/Bit
tuning range : + 280mV
PRELIMINARY
RF AMP & SERVO SIGNAL PROCESSOR
33
KB9223 / KB9223-L
M/M-97-P006
1997. 10. 17
5.2 Tracking Balance Adjustment
Figure 23. Tracking balance adjustment flow chart
5.3 Tracking Gain Adjustment
Figure 24. Tracking gain adjustment flow chart
Balance adjustment Range window
setting + 20mv, + 15mv setting
ISTAT
Check
L--> H
Finish
[RF CNT value Latch
NO
$844
ISTAT
Check
L--> H
Micom Balance
5Bit adjustment
Command Up
YES
NO
YES
$800 ~ $81F
Gain adjustment range
setting Command
ISTAT
Check
L--> H
Gain adjustment finish
NO
5 Bit Gain adjust-
ment Command
YES
$848
$820 ~ $83F
TOC READ

PRELIMINARY
RF AMP & SERVO SIGNAL PROCESSOR
34
KB9223 / KB9223-L
M/M-97-P006
1997. 10. 17
APPLICATION CIRCUIT
Figure 25. Application circuit
47K
1
2
3
4
5
6
7
8
9
1
0
1
1
1
2
1
3
1
4
1
5
1
6
1
7
1
8
1
9
2
0
2
1
2
2
2
3
2
4
2
5
2
6
2
7
2
8
2
9
3
0
3
1
3
2
3
3
3
4
3
5
3
6
3
7
3
8
3
9
4
0
6
4
6
3
6
2
6
1
6
0
5
9
5
8
5
7
5
6
5
5
5
4
5
3
5
2
5
1
5
0
4
9
4
8
4
7
4
6
4
5
4
4
4
3
4
2
4
1
8
0
7
9
7
8
7
7
7
6
7
5
7
4
7
3
7
2
7
1
7
0
6
9
6
8
6
7
6
6
6
5
K
B
9
2
2
3
MCP
DCB
FRSH
DCC2
DCC1
FSET
VDDA
VCCP
GC2I
GC2O
CH2I
CH2O
CH1O
CH1I
GC1O
GC1I
RRC
VSSP
MUTEI
ISET
VREG
WDCK
SMDP
SMON
S
M
E
F
F
L
B
F
S
3
F
G
D
L
O
C
K
T
R
C
N
T
I
S
T
A
T
A
S
Y
E
F
M
V
S
S
A
M
C
K
M
D
A
T
A
M
L
T
R
E
S
E
T
M
I
R
R
O
R
F
O
K
DVEE
FEBIAS
TG2
TGU
FDFCT
FE1
FE2
TDFCT
DVDD
LPFT
TE1
TE2
TZC
ATSC
TEO
TE-
FEO
FE-
SPDLO
SPDL-
SL-
SLO
SL+
SSTOP
G
N
D
E
I
E
Q
C
R
F
I
E
Q
O
I
R
F
R
F
O
R
F
-
V
C
C
V
R
L
D
P
D
E
F
P
D
2
P
D
1
+
152p
103p
3
3
3
p
103p
510K
+
+
+
+
+
+
V
C
G
N
D
V
C
C
V
C
C
1
K
3
.
3
u
F
A
B
C
D
E
F
V
C
C
100uF
22K
33uF
22K
4
p
F
4
7
2
p
1
0
3
p
1
u
F
4.7uF
V
C
C
VCC(POST)
27K
4
.
7
u
F
1
5
0
p
2
7
K
3
3
1
p
5
.
6
K
5
.
6
K
5
.
6
K
5
.
6
K
4
.
7
u
F
27K
GND (POST)
from MICOM
180K
from DSP
8.2K
1M
3
3
3
p
0.47uF
1
0
4
p
1
0
4
p
f
r
o
m
D
S
P
t
o
M
O
C
O
M
t
o
M
O
C
O
M
0
.
4
7
u
F
1
0
3
p
1
0
0
K
t
o
D
S
P
f
r
o
m
M
O
C
O
M
to KA9258D
6
8
3
p
1
0
3
p
5
6
K
4
7
K
10uF
1
2
0
K
3
9
1
p
1
2
0
K
1
0
0
K
to KA9258D
to KA9258D
to KA9258D
333p
1
K
2
2
2
p
1
0
0
K
1
5
0
K
103p
104p
V
C
C
104p
222p
10K
10K
1
0
4
p
G
N
D
f
r
o
m
p
i
c
k
-
u
p
+
t
o
p
i
c
k
-
u
p
1
0
2
+
33uF
+
3
3
1
p
1
5
0
p
2
7
K
152p
152p
5.6K
5.6K
from DAC CH1
from DAC CH2
CH1 out
CH2 out
+
4.7uF
from DSP(SMDP)
from DSP(SMON)
from DSP(SMSD)
+
from DSP(SMEF)
+
12K
f
r
o
m
M
O
C
O
M
f
r
o
m
M
O
C
O
M
f
r
o
m
M
O
C
O
M
t
o
M
O
C
O
M
f
r
o
m
d
e
c
k
15K
+
3
9
K
0.47uF
1
0
2
p
104p
+