 | –≠–ª–µ–∫—Ç—Ä–æ–Ω–Ω—ã–π –∫–æ–º–ø–æ–Ω–µ–Ω—Ç: GP1A35RV | –°–∫–∞—á–∞—Ç—å:  PDF PDF  ZIP ZIP |

GP1A35RV
GP1A35RV
*1 Pulse width<=100
µ
s, Duty ratio= 0.01
*2 For 5 seconds
s
Absolute Maximum Ratings
(Ta= 25∞C )
s
Features
s
Applications
s
Outline Dimensions
(Unit : mm )
1. 2-phase ( A, B ) digital output
2. High sensing accuracy
( Disk slit pitch: 0.22mm, Moire stripe appli-
cation )
3. TTL compatible output
4. Compact and light
2. Electronic typewriters, printers
3. Numerical control machines
OPIC
12.0
9.9
4.4
(7.08)
(1.27)
4.0
8.8
12.0
6.4
( 2.54
)
4
-
R2.6
20.2
3
-
( 1.27
)
1A35R
Internal connection diagram
OPIC
2.0
1 Anode
2 Cathode
5 GND
1
2
3
4
5
6
1
2
3
4
5
6
11.4
*
Tolerance
:±
0.3mm
*
( )
:
Reference dimensions
1. Copiers
High Sensing Accuracy OPIC
Photointerrupter with
Encoder Functions
Parameter
Symbol
Rating
Unit
Input
Forward current
I
F
65
mA
*1
Peak forward current
I
FM
1
A
Reverse voltage
V
R
6
V
Power dissipation
P
100
mW
Output
Supply voltage
V
CC
7
V
Low level output current
I
OL
20
mA
Power dissipation
P
O
250
mW
Operating temperature
T
opr
0 to + 70
∞C
Storage temperature
T
stg
- 40 to + 80
∞C
*2
Soldering temperature
T
sol
260
∞C
An OPIC consists of a light-detecting element and signal-
processing circuit integrated onto a single chip.
*" OPIC" (Optical IC ) is a trademark of the SHARP Corporation.
data books, etc. Contact SHARP in order to obtain the latest version of the device specification sheets before using any SHARP's device.
"
"
In the absence of confirmation by device specification sheets, SHARP takes no responsibility for any defects that occur in equipment using any of SHARP's devices, shown in catalogs,
2
-
2.0
±
0.1
0.8
±
0.15
2.0
±
0.15
3 V
OA
4 V
OB
6 V
CC
6.4
±
0.15
2.5
±
0.15
1.4
±
0.15
4
-
R1.4
±
0.15
15.0
±
0.15
8.0
MIN.
10.0
MIN.
7.3
+
0.15
-
0.1
3.9
+
0.1
-
0.2

GP1A35RV
s
Electro-optical Characteristics
(Ta= 25∞C )
s
Output Waveforms
Parameter
Symbol
Conditions
MIN.
TYP.
MAX.
Unit
Input
Forward voltage
V
F
I
F
= 30mA
-
1.2
1.5
V
Reverse current
I
R
V
R
= 3V
-
-
10
µ
A
Output
Output
voltage
Phase A
High level
V
AH
V
CC
= 5V, I
F
= 30mA
2.4
4.9
-
V
Low level
V
AL
I
OL
= 8mA, I
F
= 30mA, V
CC
= 5V
-
0.1
0.4
Phase B
High level
V
BH
V
CC
= 5V, I
F
= 30mA
2.4
4.9
-
Low level
V
BL
I
OL
= 8mA, I
F
= 30mA, V
CC
= 5V
-
0.1
0.4
Dissipation current
I
CC
-
5
20
mA
Transfer
charac-
teristics
Duty ratio
I
F
= 30mA
V
CC
= 5V
30
50
70
%
Phase difference
50
90
130
deg.
Response speed
t
r
I
F
= 30mA, V
CC
= 5V
-
1.0
2.0
µ
s
t
f
-
1.0
2.0
t
AH
t
AP
t
BH
t
BP
*4
A
=
x 100,
B
=
x 100
t
AP
t
AB1
*5
AB1
=
x 360∞
*3 In the condition that output A and B are low level.
t
AH
t
AP
t
AB1
t
BH
t
BP
Output A
( V
OA
)
Output B
( V
OB
)
Rotational direction
:
Counterclockwise when seen
from OPIC light detector
*6 Measured under the condition shown in Measurement Conditions.
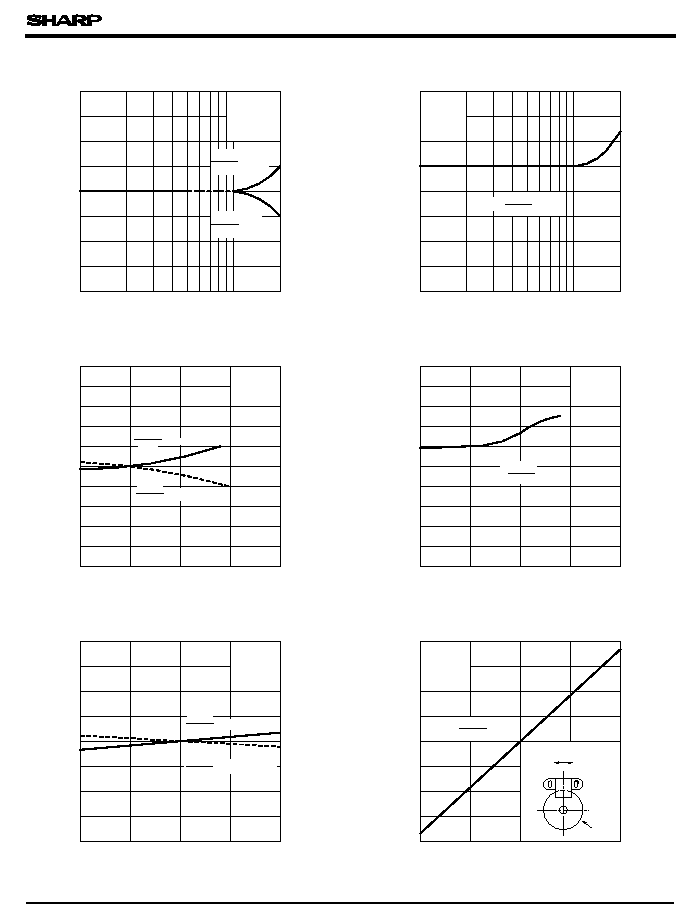
70
0
25
50
75
100
60
50
40
30
20
10
0
70
0
50
100
150
200
250
300
100
75
50
25
0
70
80
90
100
65
Fig. 1 Forward Current vs. Ambient
Temperature
Fig. 2 Output Power Dissipation vs.
Ambient Temperature
Ambient temperature T
a
(∞C)
Ambient temperature T
a
(∞C)
Forward current I
F
(
mA
)
Output power dissipation P
o
(
mW
)
*6
f= 12kHz
*6
f= 12kHz
*3
V
CC
= 5V, I
F
= 30mA
*4
A
*4
B
*5
AB1
GP1A35RV
0.8
0.9
20
0.5
0.4
0.3
0.2
0.1
0.7
0.6
Duty ratio
Frequency f ( kHz )
(Output A )
5
2
10
1
(Output B )
60
50
20
10
5
2
1
130
120
110
100
70
80
90
0.7
0.8
0.9
1.0
100
75
50
0
25
0.5
0.6
0
0.1
0.2
0.3
0.4
Duty ratio
f= 12kHz
( Output B)
( Output A)
140
60
50
40
25
0
50
75
100
f= 12kHz
70
80
90
100
110
120
130
0.8
0.9
0.5
- 0.5
- 1.0
0
1.0
f= 12kHz
Duty ratio
0.5
0.4
0.3
0.2
0.1
0.7
0.6
(Output A )
(Output B )
Distance X ( mm ) ( Shifting encoder )
60
1.0
0.5
0
- 0.5
- 1.0
f= 12kHz
130
120
110
100
90
80
70
Distance X ( mm ) ( Shifting encoder)
Reference position
Disk
( - )
( + )
140
Fig. 3 Duty Ratio vs. Frequency
V
CC
= 5V
I
F
= 30mA
T
a
= 25∞C
t
AH
t
BH
t
BP
V
CC
= 5V
I
F
= 30mA
T
a
= 25∞C
Phase difference
AB1
AB1
=
x 360∞
t
AB1
t
AP
Fig. 6 Phase Difference vs. Ambient
Temperature
V
CC
= 5V
I
F
= 30mA
Phase difference
AB1
Ambient temperature T
a
(∞C)
AB1
=
x 360∞
t
AB1
t
AP
Fig. 5 Duty Ratio vs. Ambient Temperature
V
CC
= 5V
I
F
= 30mA
t
AH
t
AP
t
BH
t
BP
V
CC
= 5V
I
F
= 30mA
T
a
= 25∞C
Phase difference
AB1
AB1
=
x 360∞
t
AB1
t
AP
GP1A35RV
Fig. 7 Duty Ratio vs. Distance (Xdirection )
V
CC
= 5V
I
F
= 30mA
T
a
= 25∞C
t
AH
t
AP
t
BH
t
BP
Fig. 8 Phase Difference vs.
Distance (Xdirection )
t
AP
Fig. 4 Phase Difference vs. Frequency
Frequency f ( kHz )
Ambient temperature T
a
( ∞C)
(
deg.
)
(
deg.
)
(
deg.
)

GP1A35RV
(Output B )
(Output A )
0.6
0.7
0.1
0.2
0.3
0.4
0.5
0.9
0.8
1.0
0.5
0
- 0.5
- 1.0
Distance Y ( mm ) ( Shifting encoder )
Duty ratio
Disk
70
80
90
100
110
120
130
50
60
1.0
0.5
0
- 0.5
- 1.0
( + )
( - )
Distance Y ( mm ) ( Shifting encoder )
position
Z
OPIC
( Emitting side )
( Detecting side)
Disk
Distance Z ( mm ) ( Shifting encoder )
0.8
0.7
0.6
0.5
0.4
0.3
0.2
0.1
Distance Z ( mm ) ( Shifting encoder)
(Output B )
(Output A )
Duty ratio
f = 12kHz
0
0.9 1.0
f= 12kHz
1.0
0.9
0
0.1
0.2 0.3 0.4 0.5 0.6
0.7 0.8
60
130
120
110
100
90
80
70
140
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0
V
CC
= 5V
I
F
= 30mA
f= 12kHz
t
AB1
AB1
=
x 360∞
t
AP
Phase difference
AB1
GP1A35RV
Fig. 9 Duty Ratio vs. Distance (Ydirection )
V
CC
= 5V
I
F
= 30mA
T
a
= 25∞C
t
AH
t
AP
t
BH
t
BP
V
CC
= 5V
I
F
= 30mA
T
a
= 25∞C
Phase difference
AB1
AB1
=x
360 ∞
t
AB1
t
AP
Fig.11 Duty Ratio vs. Distance (Zdirection )
V
CC
= 5V
I
F
= 30mA
T
a
= 25∞C
t
AH
t
AP
t
BH
t
BP
Fig.10 Phase Difference vs.
Distance (Ydirection )
Fig.12 Phase Difference vs.
Distance (Zdirection )
f= 12kHz
Reference
T
a
= 25∞C
(
deg.
)
(
deg.
)

GP1A35RV
15
20.2
1.4
6.4
12.86
4-R1.4
Disk center
X'
Note 1
)
Note 2)
R14
8.8
1A35R
X
9.9
7.3
12
(12.0)
0.3
2
0.8 A
Measurement Conditions
Detection signal of
rotational direction
B output
R16.5
3.8
0.9
∞
( Number of slit
:
400)
0.45
∞
Q
Q
D
T
T
D
Q
Q
T
D
Q
Q
M
C
∑
W C
∑
C
∑
W
R
C
GP1A35RV
Q
1
Q'
1
Q
3
Q'
3
Q
2
Q
4
s
Precautions for Use
s
Application Circuit (Detection of Rotational Direction )
( 1) This module is designed to be operated at I
F
= 30mA TYP.
( 2 ) Fixing torque : MAX. 0.6N ∑ m
( 3) In order to stabilize power supply line, connect a by-pass capacitor of more than 0.01
µ
F
between Vcc and GND near the device.
Note
1) Distance between disk surface and case surface in the detector side is 0.3mm.
2) Encoder positioning pin is positioned on X-X' axis.
Distance between center of disk and portion A of positioning pin is 12.86mm.
3 ) Center of disk slit is R14.0.
A
output
3.9
When gate delay causes pulse noise in Q4 output,
apply the CR filter to remove pulse noise.
( 4) As for other general cautions, refer to the chapter " Precautions for Use " .