1
Features
�
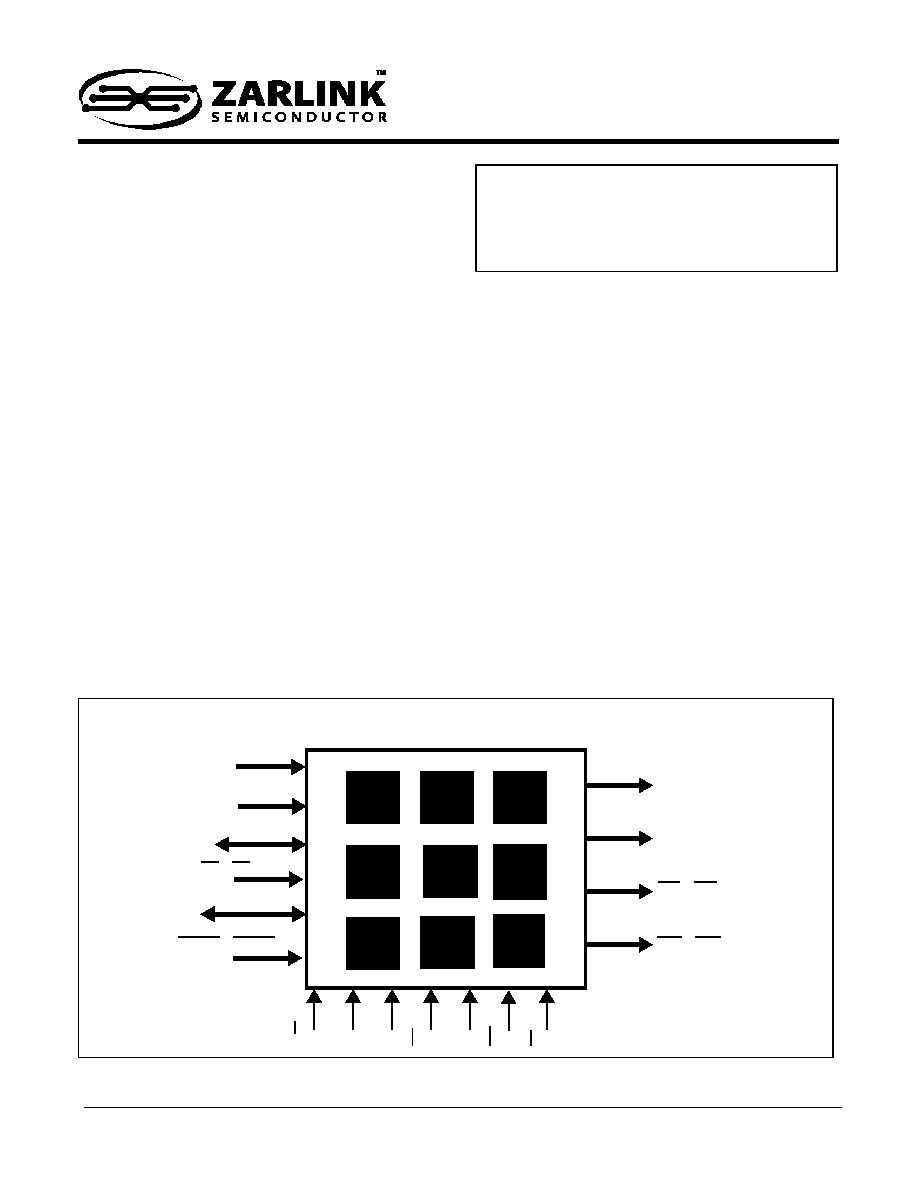
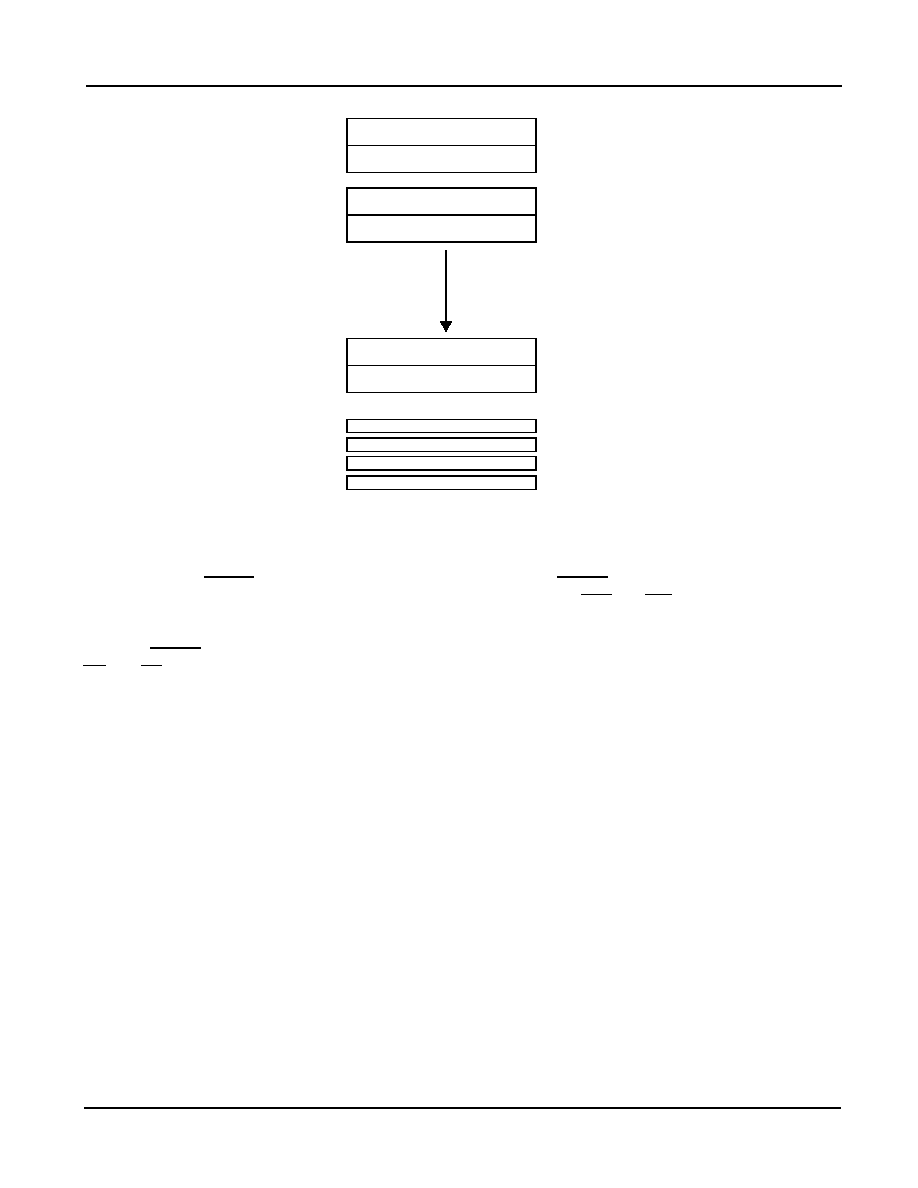
ZL50212 has nine Echo Voice Processors in a
single BGA package. This single device provides
288 channels of 64 msec echo cancellation or 144
channels at 128 msec echo cancellation
�
Each Echo Voice Processor has the capability of
cancelling echo over 32 channels
�
Each Echo Voice Processor (EVP) shares the
address bus and data bus with each other
�
Fully compliant to ITU-T G.165, G.168 (2000) and
(2002) specifications
�
Passed all AT&T voice quality tests for carrier
grade echo canceller
�
The ZL50212 provides more than 63% board
space savings when compared with the nine Echo
Voice Processors packaged devices
�
Each EVP has a Patented Advanced Non-Linear
Processor with high quality subjective performance
�
Each EVP has protection against narrow band
signal divergence and instability in high echo
environments
�
Each EVP can be programmed independently in
any mode e.g. Back-to-Back or Extended Delay to
provide capability of cancelling different echo tails.
�
Each EVP has 0 to -12 dB level adjusters at all
signal ports (Rin, Sin, Sout and Rout)
�
Each EVP has the same JTAG identification code
Applications
�
Voice over IP network gateways
�
Voice over ATM, Frame Relay
�
T1/E1/J1 multichannel echo cancellation
�
Wireless base stations
�
Echo Canceller pools
�
DCME, satellite and multiplexer system
Description
The ZL50212 Voice Echo Canceller implements a cost
effective solution for telephony voice-band echo
cancellation conforming to ITU-T G.168 requirements.
The ZL50212 architecture contains 144 groups of two
echo cancellers (ECA and ECB) which can be
configured to provide two channels of 64 milliseconds
or one channel of 128 milliseconds echo cancellation.
This provides 288 channels of 64 milliseconds to 144
channels of 128 milliseconds echo cancellation or any
combination of the two configurations. The ZL50212
supports ITU-T G.165 and G.164 tone disable
requirements.
March 2003
Ordering Information
ZL50212GB 535 - Ball BGA
-40
�C to +85�C
ZL50212
288 Channel Voice Echo Canceller
Data Sheet
Figure 1 - ZL50212 Device Overview
EVP1
Rin1...Rin9
Sin1....Sin9
CS1..CS9
D0....D7
A0..A12
RESET1..RESET9
R/W
ML
CK
C4i
Fo
i
ODE
DS
Fsel
Rout1..Rout9
Sout1..Sout9
IRQ1..IRQ9
DTA1..DTA9
EVP4
EVP6
EVP7
EVP8
EVP5
EVP3
EVP2
ZL50212GB
EVP9
ZL50212
Data Sheet
2
Zarlink Semiconductor Inc.
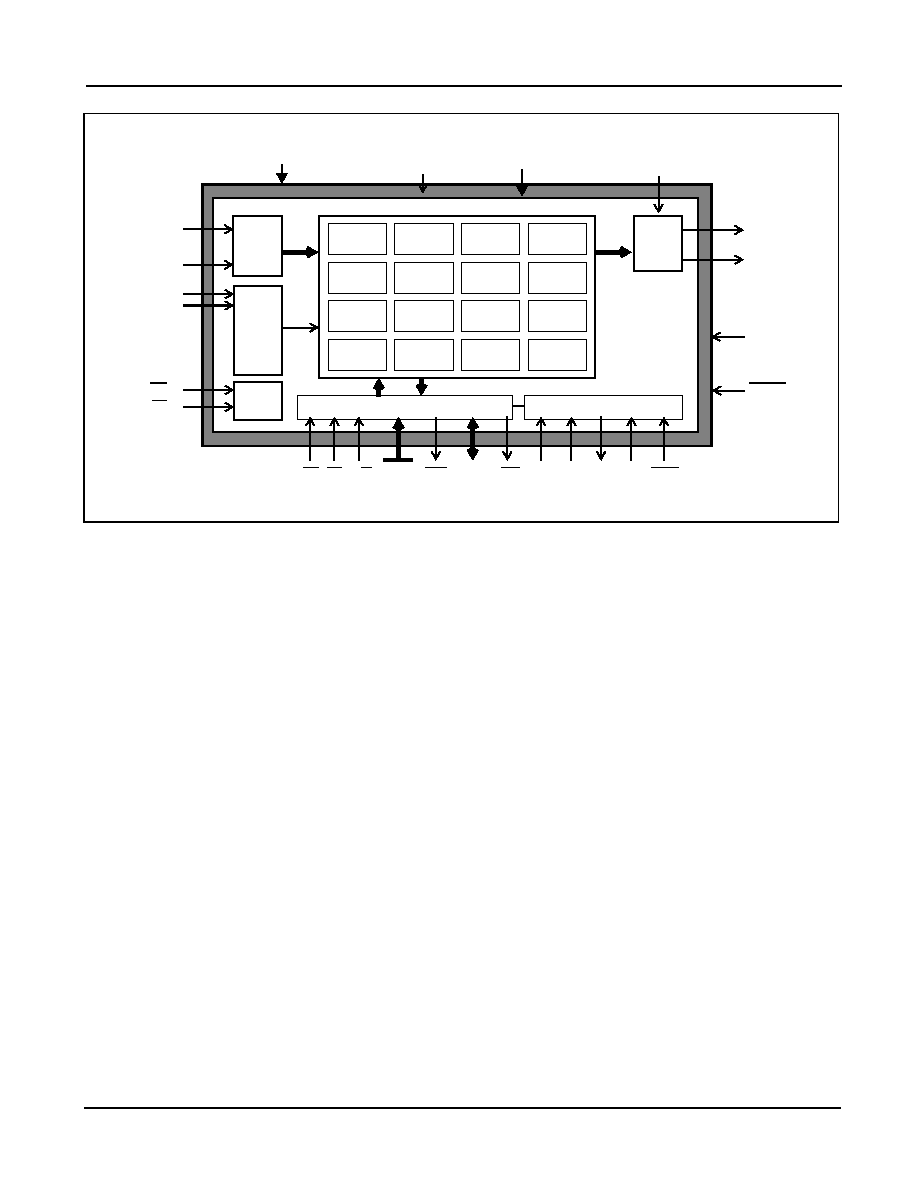
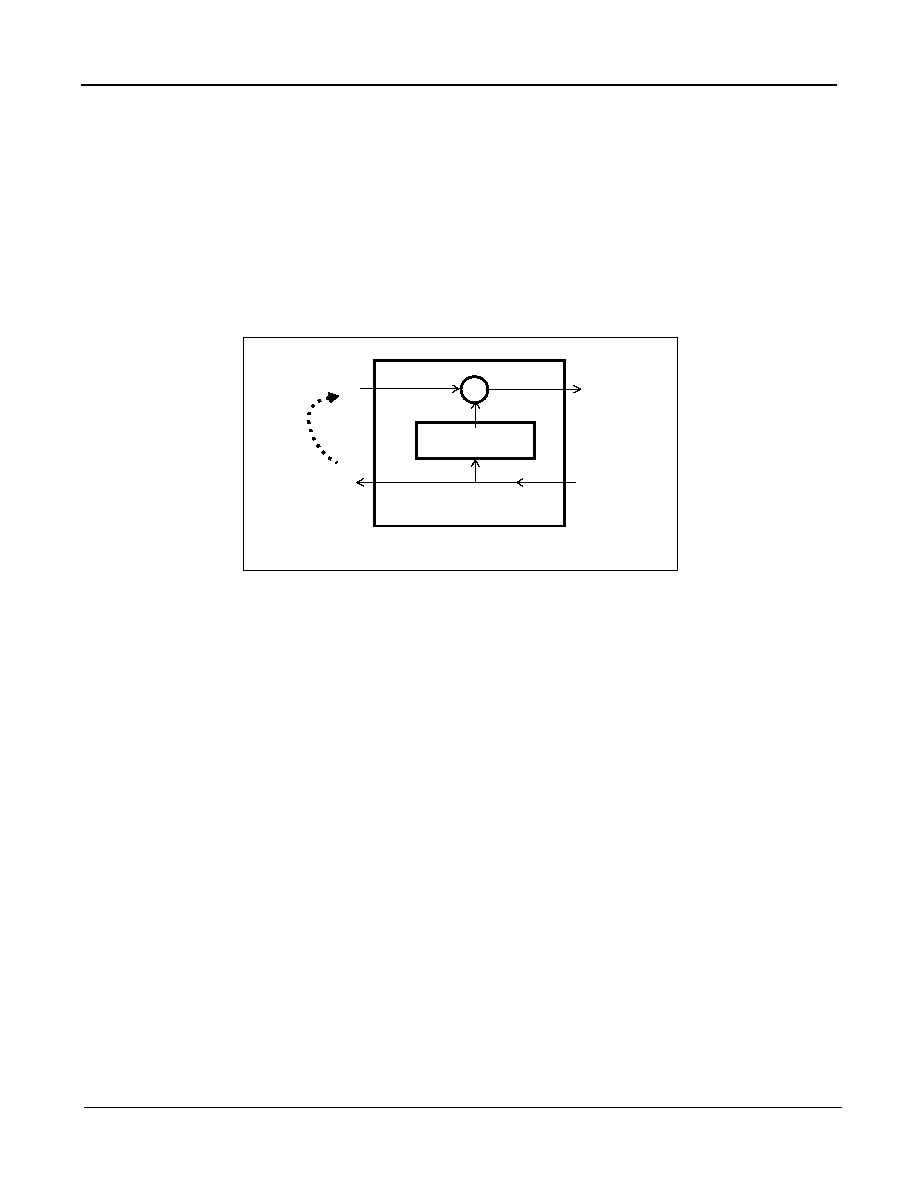
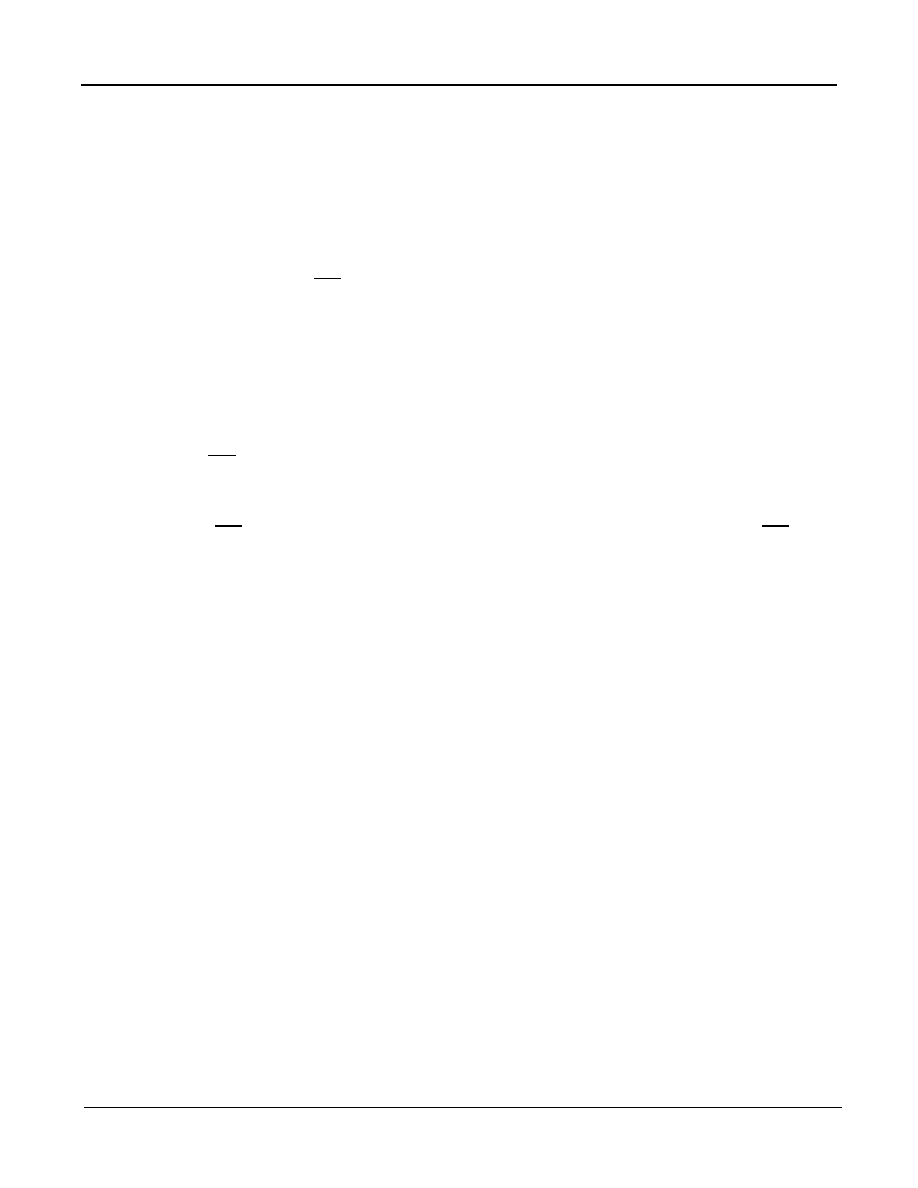
Figure 2 - Single Echo Voice Processor (EVP) Overview
Features of Echo Voice Processor (EVP)
�
Each EVP can cancel echo tails of 64ms (32 channels) to 128ms (16 channels) with the ability to mix
channels at 128ms or 64ms in any combination
�
Independent Power Down mode for each group of 2 channels for power management
�
Fully compliant to ITU-T G.165, G.168 (2000) and (2002) specifications
�
Passed all AT&T voice quality tests for carrier grade echo canceller
�
Compatible to ST-BUS and GCI interface at 2Mb/s serial PCM
�
PCM coding,
�/A-Law ITU-T G.711 or sign magnitude
�
Per channel Fax/Modem G.164 2100Hz or G.165 2100Hz phase reversal Tone Disable
�
Per channel echo canceller parameters control
�
Transparent data transfer and mute
�
Fast reconvergence on echo path changes
�
Fully programmable convergence speeds
�
Patented Advanced Non-Linear Processor with high quality subjective performance
�
Protection against narrow band signal divergence and instability in high echo environments
�
0 dB to -12 dB level adjusters (3 dB steps) at all signal ports
�
Offset nulling of all PCM channels
�
10 MHz or 20 MHz master clock operation
�
3.3 V pads and 1.8V Logic core operation with 5-Volt tolerant inputs
�
IEEE-1149.1 (JTAG) Test Access Port
RESET
Rout
IC0
Sout
DS CS R/W A12-A0 DTA D7-D0
Echo Canceller Pool
V
SS
V
DD1 (3.3V)
TDI TDO TCK TRST
TMS
Rin
IRQ
C4i
F0i
MCLK
ODE
Sin
Fsel
Test Port
Microprocessor Interface
Timing
Unit
Serial
to
Parallel
Parallel
to
Serial
PLL
Group 0
ECA/ECB
Group 4
ECA/ECB
Group 8
ECA/ECB
Group 12
ECA/ECB
Group 1
ECA/ECB
Group 5
ECA/ECB
Group 9
ECA/ECB
Group 13
ECA/ECB
Group 2
ECA/ECB
Group 6
ECA/ECB
Group 10
ECA/ECB
Group 14
ECA/ECB
Group 3
ECA/ECB
Group 7
ECA/ECB
Group 11
ECA/ECB
Group 15
ECA/ECB
Note:
Refer to Figure 4
for EVP block
diagram
V
DD2 (1.8V)

Data Sheet
ZL50212
3
Zarlink Semiconductor Inc.
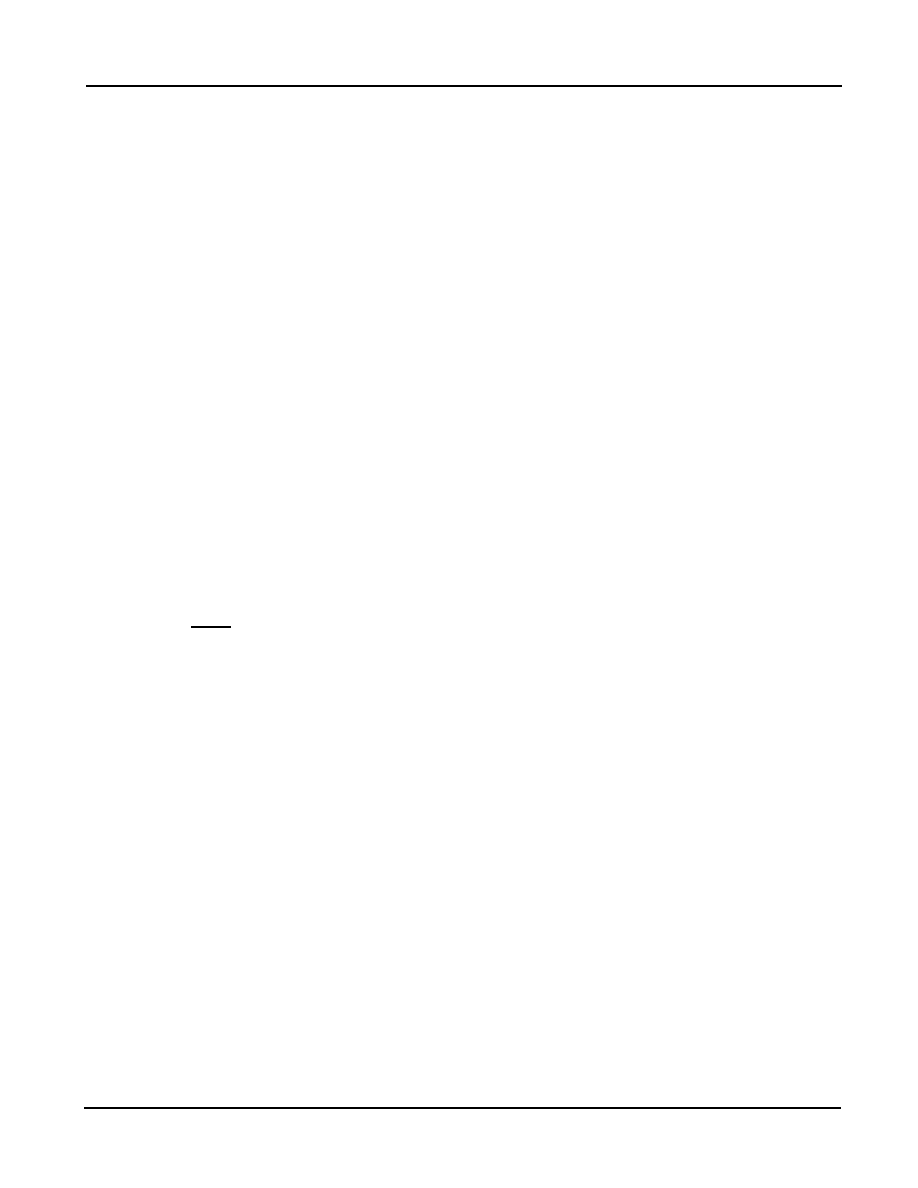
Figure 3 - 535 Ball BGA Ball Grid Array
1
B
C
D
E
F
G
H
J
K
L
M
N
A
P
R
T
U
V
W
Y
1
2
3
4
5
6
7
8
9
10 11
12
13
14 15
16 17
18 19 20 21 22
23
24
25 26
27
28
29
30
AA
AJ
AK
AG
AE
AH
AD
AC
AB
AF
B
C
D
E
F
G
H
J
K
L
M
N
A
P
R
T
U
V
W
Y
AA
AJ
AK
AG
AE
AH
AD
AC
AB
AF
1
2
3
4
5
6
7
8
9
10 11
12
13
14 15
16 17
18 19 20 21 22
23
24
25 26
27
28
29
30
ZL50212GB
BGA BALL GRID ARRAY
ZL50212
Data Sheet
4
Zarlink Semiconductor Inc.
Pin Description
Signal
Name
Signal
Type
BGA Ball #
Signal Description
V
DD1
= 3.3V
(V
DD_IO
)
Power
AC5,AC26,AC27,AD26,AD5,AE5,AF12,AF13,AF1
4,AF17,AF18,AF19,AF24,AF6,AF7,AF8,AG24,AH
24,E13,E14,E17,E18,E19,E23,E24,E25,E6,E7,E8,
F5,G26,G27,G5,H26,H5,M26,M5,N26,N5,P26,P27
, P4,P5,U26,U27,U4,U5,V26,V5,W26,W5
Positive Power Supply.
Nominally 3.3 volt ( I/O
voltage).
V
DD2
= 1.8V
(V
DD_Core
)
Power
AA26,AA28,AA3,AA5,AB26,AB28,AB3,AB5,AF11,
AF20,AG10,AG21,AG22,AH10,AH11,AH22,AJ15,
AJ16,AJ9,AK9,C10,C11,C22,C23,C9,D10,D23,D9,
E11,E20,E21,E22,J26,J27,J4,J5,K26,K27,K3,K5,
L26,L27,L3,L5,Y26, Y27,Y3,Y5
Positive Power Supply.
Nominally 1.8 volt (Core
voltage).
VSS
Power
A29,A30,AF5,AG15,AG16,AG26,AG27,AG4,AH15
,
AH16,AH21,AH28,AH3,AJ2,AJ21,AJ29,AK1,AK30,
B1,B15,B16,B2,B29,C15,C16,C28,C3,D15,D16,
D27,D4,E26,E5,N13,N14,N15,N16,N17,N18,P13,
P14,P15,P16,P17,P18,R13,R14,R15,R16,R17,
R18,R2,R27,R28,R29,R3,R4,T13,T14,T15,T16,
T17,T18,T2,T27,T28,T29,T3,T4,U13,U14,U15,
U16,U17,U18,V13,V14,V15,V16, V17,V18
Ground
TEST PINS
TE1, TE2,
TE3, TE4,
TE5, TE6,
TE7, TE8,
TE9
Test Mode
Pins
M4,AK26,M3,AJ4,AK4,AK25,K30,N28,AJ14
Internal Connection.
Connected to VSS for
normal operation.
OUTPUT
TEST PINS
Test
pins
D8,P28,C12,AK10,AH12,AD29,H28,J29,AC28,
D12,P29,E9,AJ11,AK11,AD30,G28,H29,AB27,A3,
P2,A2,Y1,AA1,AJ17,C20,B21,AK17,B3,P1,D3,
AA2,AB1,AK18,B22,D21,AJ18,C2,R1,E3,AB2,
AB4,AH18,D19,A22,AK19,D2,T1,E4,AC1,AC2,
AG18,A21,B20,AJ19,C1,U1,F4,AC4,AD1,AK20,
C19,A20,AH19,F3,U2,E2,AC3,AD2,AK21,B19,
A19,AG19,E10,P30,B12,AJ12,AG13,AC29,J30,
G29,AC30,A11,N30,D11,AH13,AK12,AB29,H30,
G30,AB30,A10,N27,B11,AJ13,AG14,AA27,F29,
F30,AA29,A9,A14,B10,AG11,AG12,Y28,E29,E28,
AA30,A8,A13,B9,AJ10,AF10,Y29,D29,E30,Y30,
C8,B14,B8,AG9,AH9,W28,D26,D28,W29,C4,
E12,C5,AA4,Y4,R30,A23,B23,
T30,B4,P3,A4,Y2,W1,AG17,D20,C21,AH17
No connection. These
pins must be left open for
normal operation.
Data Sheet
ZL50212
5
Zarlink Semiconductor Inc.
INPUT TEST
PINS
SC_EN,
SC_FCLK,
SC_IN,
SC_M_MCLK,
SC_RESET,
SC_SET,
SC_T_MCLK,
A27,D5,A25,A26,A24,B24,A28
Internal Connection.
Connected to VSS for
normal operation.
THalt
and TStep
Halt
Step
C14, D14
Internal Connection.
Connected to VSS for
normal operation.
Signal Name
Signal
Type
BGA Ball #
Signal Description
USER SIGNAL PINS
D0, D1, D2, D3, D4, D5,
D6, D7
User
Signals
AK7,AJ8,AK8,
AJ27,AK29,AJ28,
AH27, AJ30
Data Bus D0 to D7 (Bidirectional). These pins form
the 8-bit bidirectional data bus of the microprocessor
port. They are connected to all the EVP's.
A0,A1,A2,A3,A4,A5,
A6,A7, A8, A9,
A10,A11,A12
User
Signals
AG28,AH29,
AH30,AG29,AF28,
AG30,AE28,AF29,
AE29,AF30,AD27,
AE30,AD28
Address A0 to A12 (Input). These inputs provide the
A12 - A0 address lines to the internal registers. They
are connected to all the EVP's.
CS1,CS2,CS3,
CS4, CS5, CS6,
CS7, CS8, CS9
User
Signals
R5,L28,T5,AF15,
AF16,E16,T26,
R26,E15
Chip Select (Input). These active low inputs are used
to enable the microprocessor interface of each EVP .
RESET1 RESET2,
RESET3, RESET4,
RESET5, RESET6,
RESET7, RESET8,
RESET9
User
Signals
M2,AH23,M1,AH5,
AJ5,AJ23,N29,
M30, AK14
EVP Reset (Schmitt Trigger Input). An active low
resets the device and puts the Voice Processor into a
low-power stand-by mode. When the RESET pin is
returned to logic high and a clock is applied to the
MCLK pin, the EVP will automatically execute
initialization routines, which preset all the Control
and Status Registers to their default power-up
values. Each reset pin controls a single processor. A
user can connect all of them together if required.
Rin1, Rin2, Rin3,
Rin4, Rin5, Rin6,
Rin7, Rin8, Rin9
User
Signals
C6,V27,B5,AG5,
AH6,U28,B27,B28,
D13
Receive PCM Signal Inputs (Inputs). Port 1 TDM
data input streams. Each Rin pin receives serial TDM
data streams at 2.048 Mb/s with 32 channels per
stream.
Sin1, Sin2, Sin3, Sin4,
Sin5, Sin6, Sin7, Sin8,
Sin9
User
Signals
C7,U30,B6,AG7,
AG6,U29,B30,C27,
A12
Send PCM Signal Inputs (Inputs). Port 2 TDM data
input streams. Each Sin pin receives serial TDM data
streams at 2.048 Mb/s with 32 channels per stream.
Rout1, Rout2, Rout3,
Rout4, Rout5, Rout6,
Rout7, Rout8, Rout9
User
Signals
A5,V30,A6,AH7,
AG8,V28,C26,C30,
C13
Receive PCM Signal Outputs (Outputs). Port 2 TDM
data output streams. Each Rout pin outputs serial
TDM data streams at 2.048 Mb/s with 32 channels per
stream.
Pin Description (continued)
Signal
Name
Signal
Type
BGA Ball #
Signal Description
ZL50212
Data Sheet
6
Zarlink Semiconductor Inc.
Sout1,Sout2,Sout3,
Sout4,Sout5,Sout6,
Sout7,Sout8,Sout9
User
Signals
B7,W27,A7,AH8,
AF9,W30,C29,D30,
B13
Send PCM Signal Outputs (Outputs). Port 1 TDM
data output streams. Each Sout pin outputs serial TDM
data streams at 2.048 Mb/s with 32 channels per
stream.
DS
User
Signal
K29
Data Strobe (Input). This active low input works in
conjunction with CS to enable the read and write
operations. This signal is connected to all processors.
R/W
User
Signal
M29
Read/Write (Input). This input controls the direction of
the data bus lines (D7-D0) during a microprocessor
access. This signal is connected to all processors.
DTA1, DTA2, DTA3,
DTA4, DTA5, DTA6,
DTA7, DTA8, DTA9
User
Signals
N2,AK28,N1,AK6,
AJ7,AK27,M28,
M27,AK16
Data Transfer Acknowledgment (Open Drain
Output). These active low outputs indicate that a data
bus transfer is completed. A pull-up resistor (1K
typical) is required at these outputs.
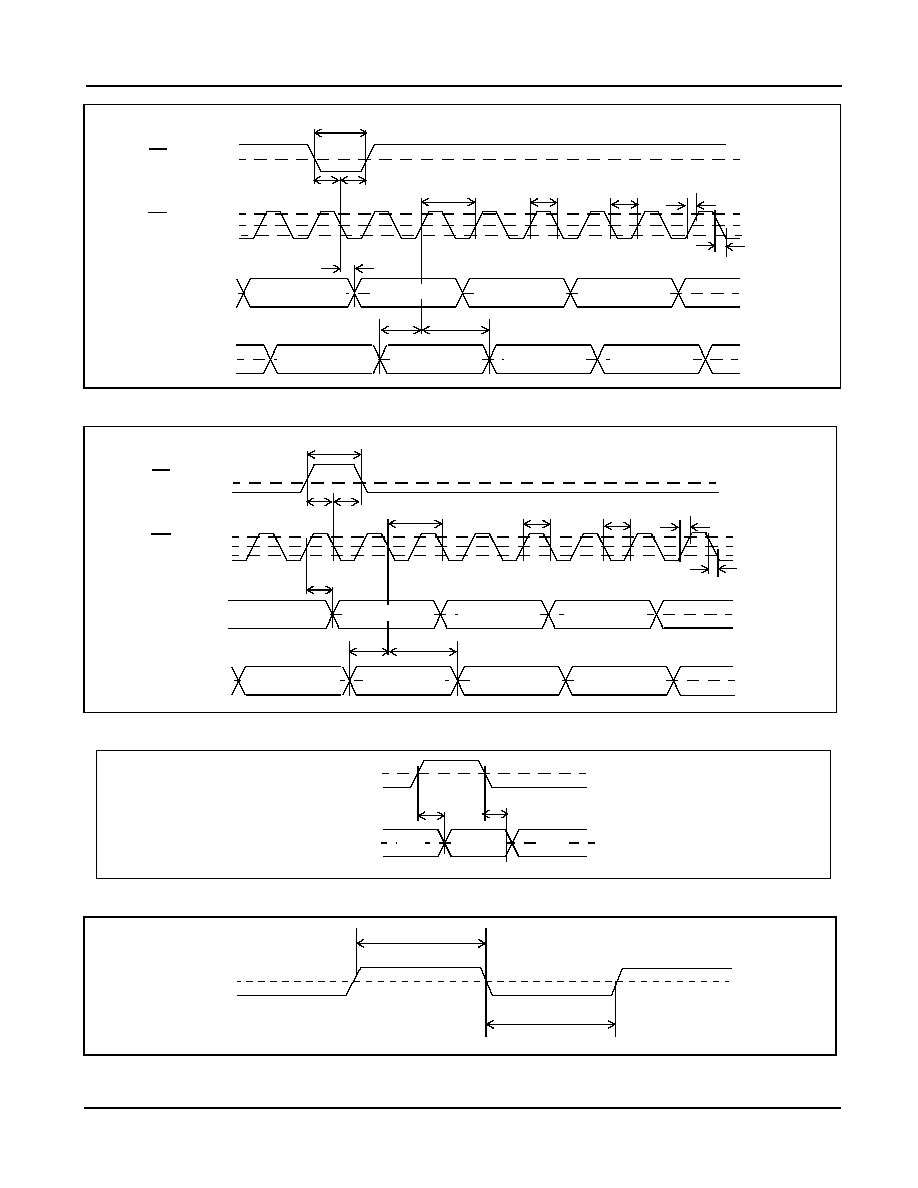
ODE
User
Signal
V29
Output Drive Enable (Input). This input pin is
logically AND'd with the ODE bit-6 of the Main Control
Register. When both ODE bit and ODE input pin are
high, the Rout and Sout ST-BUS outputs are enabled.
When the ODE bit is low or the ODE input pin is low,
the Rout and Sout ST-BUS outputs are high
impedance. This signal is connected to all processors.
F0i
User
Signal
B26
Frame Pulse (Input). This input accepts and
automatically identifies frame synchronization signals
formatted according to ST-BUS or GCI interface
specifications.This signal is connected to all
processors.
C4i
User
Signal
B25
Serial Clock (Input). 4.096 MHz serial clock for
shifting data in/out on the serial streams (Rin, Sin,
Rout, Sout).This signal is connected to all processors.
Fsel
User
Signal
A15
Frequency select (Input). This input selects the Mas-
ter Clock frequency operation. When Fsel pin is low,
nominal 20MHz Master Clock input must be applied.
When Fsel pin is high, nominal 10MHz Master Clock
input must be applied.This signal is connected to all
processors.
MCLK
User
Signal
A16
Master Clock (Input). Nominal 10MHz or 20MHz
Master Clock input. May be connected to an
asynchronous (relative to frame signal) clock
source.This signal is connected to all processors.
IRQ1, IRQ2, IRQ3,
IRQ4, IRQ5, IRQ6,
IRQ7, IRQ8, IRQ9
User
Signals
N4,AJ26,N3,AK5,
AJ6,AG23,L30,L29,
AK15
Interrupt Request (Open Drain Output). These
outputs go low when an interrupt occurs in any
channel. Each IRQ returns high when all the interrupts
have been read from the Interrupt FIFO Register of
respective EVP. A pull-up resistor (1K typical) is
required at these outputs.
Signal Name
Signal
Type
BGA Ball #
Signal Description
Data Sheet
ZL50212
7
Zarlink Semiconductor Inc.
Extra Device Pins
-
W3,E15,V4,AK16,
AK15,AK14,D13,
C13,V3,A12,B13,
AK13,AH14,U3,V2,
AJ14
No connection. The ball pins must be left open for
normal operation.
JTAG SIGNAL PINS
TMS
JTAG
Signal
K2
Test Mode Select (3.3V Input). JTAG signal that
controls the state transitions of the TAP controller. This
pin is pulled high by an internal pull-up when not
driven. This signal is connected to all processors.
TCK
JTAG
Signal
D6
Test Clock (3.3V Input). Provides the clock to the
JTAG test logic.This signal is connected to all
processors.
TRST
JTAG
Signal
D7
Test Reset (3.3V Input). Asynchronously initializes
the JTAG TAP controller by putting it in the
Test-Logic-Reset state. This pin should be pulsed low
on power-up or held low, to ensure that all the EVP's
are in the normal functional mode. This pin is pulled by
an internal pull-down when not driven. This signal is
connected to all EVP's.
TDI1,TDI2,TDI3,TDI4,
TDI5,TDI6,TDI7,TDI8,
TDI9
JTAG
Signals
K1,AK23,L2,AK2,
AJ3,AH20,F27,
H27, AK13
Test Serial Data In (3.3V Input). JTAG serial test
instructions and data are shifted in on these pins.
These pins are pulled high by an internal pull-up when
not driven.
TDO1,TDO2,TDO3,
TDO4,TDO5,TDO6
TDO7,TDO8,TDO9
JTAG
Signals
L1,AJ22,L4,AH4,
AK3,AK24,J28,
K28,AH14
Test Serial Data Out (Output). JTAG serial data is
output on this pins on the falling edge of TCK. These
pins are held in high impedance state when JTAG
scan is not enabled.
PLL SIGNAL PINS
PLLV
DD2
= 1.8V
PLL
Power
H3,V1,H4,AE3,
AG2,AE26,D22,
C24, AE27
PLL Power Supply. Must be connected to
V
DD2
= 1.8V.
PLLV
SS1
PLLV
SS2
PLL
Power
J3,W2,H2,AF4,
AF3,AF27,D24,
C25,AF26,H1,W4,
J2, AH1,AG3,AF22,
D25,E27,AF21
PLL Ground. Must be connected to VSS.
T1M1, T1M2, T1M3,
T1M4, T1M5, T1M6,
T1M7, T1M8, T1M9
PLL Test
Signals
D1,AH26,E1,AE1,
AD4,AK22,D18,
C18,U3
Internal Connection. Connected to VSS for normal
operation.
T2M1, T2M2, T2M3,
T2M4, T2M5, T2M6,
T2M7, T2M8,T2M8
PLL Test
Signals
F2,AG25,G3,AF1,
AD3,AF25,B18,
A18,V2
Internal Connection. Connected to VSS for normal
operation.
Signal Name
Signal
Type
BGA Ball #
Signal Description
ZL50212
Data Sheet
8
Zarlink Semiconductor Inc.
The following description applies to a single EVP (Echo Voice Processor). Note that the ZL50212 contains
nine EVP's.
SG1, SG2, SG3, SG4,
SG5, SG6, SG7, SG8,
SG9
PLL Test
Signals
G4,AJ25,F1,AE2,
AG1,AH25,B17,
C17,V3
Internal Connection. Connected to VSS for normal
operation.
DT1, DT2, DT3, DT4,
DT5, DT6, DT7,
DT8,DT9
PLL Test
Signals
G2,AF23,G1,AF2,
AE4,AJ24,D17,
A17,V4
No connection. These pins must be left open for
normal operation.
AT1, AT2, AT3, AT4,
AT5, AT6, AT7, AT8,AT9
PLL Test
Signals
K4,AJ20,J1,
AH2,AJ1,AG20,
F28,F26,W3
No connection. These pins must be left open for
normal operation.
Signal Name
Signal
Type
BGA Ball #
Signal Description
Data Sheet
ZL50212
9
Zarlink Semiconductor Inc.
1.0
Single Echo Voice Processor (EVP) Description
Each single Echo Voice Processor (EVP) contains 32 echo cancellers divided into 16 groups. Each group has two
echo cancellers, Echo Canceller A (ECA) and Echo Canceller B (ECB). Each group can be configured in Normal,
Extended Delay or Back-to-Back configurations. In Normal configuration, a group of echo cancellers provides two
channels of 64ms echo cancellation, which run independently on different channels. In Extended Delay
configuration, a group of echo cancellers achieves 128ms of echo cancellation by cascading the two echo cancellers
(A & B). In Back-to-Back configuration, the two echo cancellers from the same group are positioned to cancel echo
coming from both directions in a single channel, providing full-duplex 64ms echo cancellation.
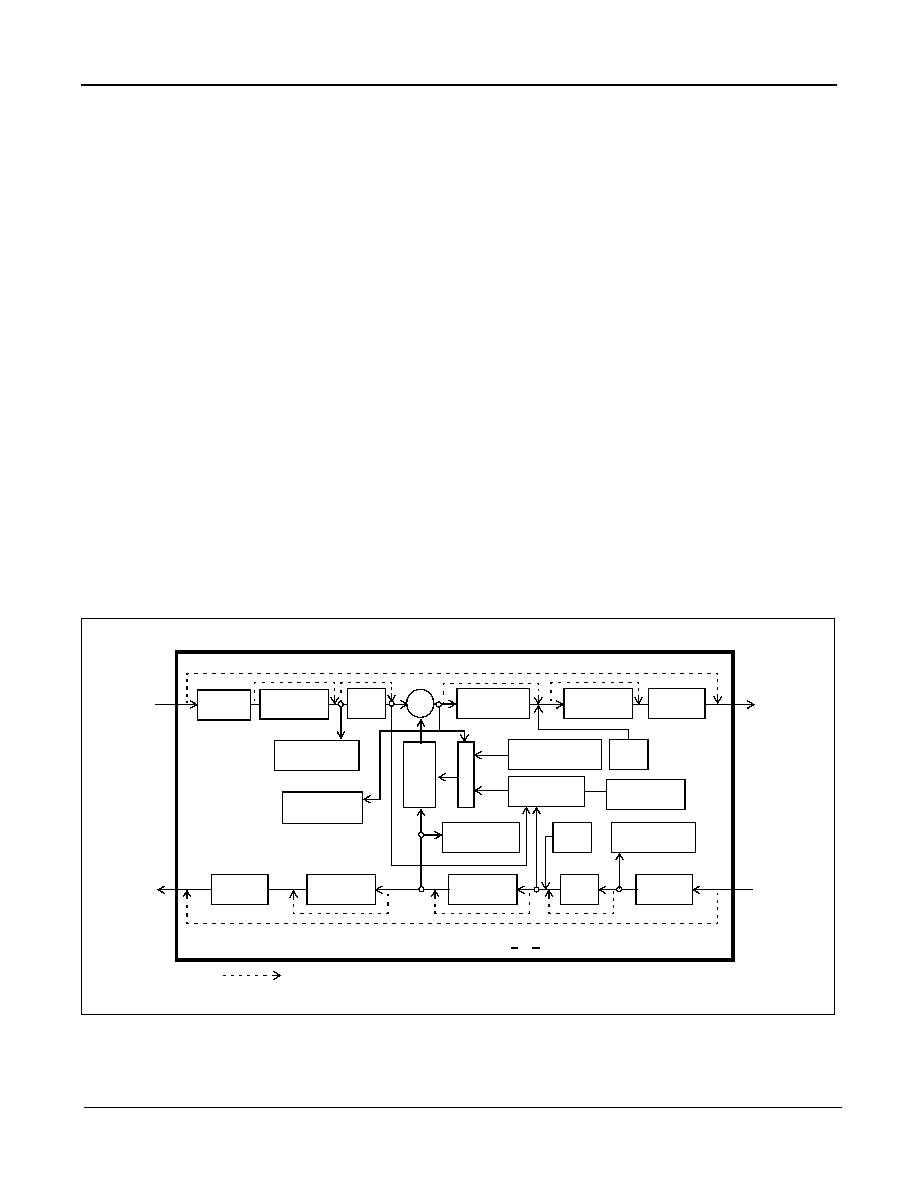
Each Echo Voice Processor contains the following main elements (see Figure 4).
�
Adaptive Filter for estimating the echo channel
�
Subtractor for cancelling the echo
�
Double-Talk detector for disabling the filter adaptation during periods of double-talk
�
Path Change detector for fast reconvergence on major echo path changes
�
Instability Detector to combat instability in very low ERL environments
�
Patented Advanced Non-Linear Processor for suppression of residual echo, with comfort noise injection
�
Disable Tone Detectors for detecting valid disable tones at send and receive path inputs
�
Narrow-Band Detector for preventing Adaptive Filter divergence from narrow-band signals
�
Offset Null filters for removing the DC component in PCM channels
�
0 to -12dB level adjusters at all signal ports
�
Parallel controller interface compatible with Motorola microcontrollers
�
PCM encoder/decoder compatible with
�/A-Law ITU-T G.711 or Sign-Magnitude coding
Each echo canceller in the EVP has four functional states: Mute, Bypass, Disable Adaptation and Enable Adaptation.
These are explained in the section entitled Echo Canceller Functional States.
Figure 4 - Functional Block Diagram of an Echo Canceller
Non-Linear
Processor
Offset
Null
Linear/
�/A-Law
Microprocessor
Interface
Double - Talk
Detector
Co
nt
rol
Narrow-Band
Detector
�/A-Law/
Linear
Offset
Null
Echo Canceller (N), where 0 < N < 31
Sout
Rin
Sin
Rout
-
Programmable Bypass
(channel N)
(channel N)
(channel N)
(channel N)
ST-BUS
ST-BUS
PORT2
PORT1
MuteR
MuteS
0 to -12dB
Level Adjust
Linear/
�/A-Law
0 to -12dB
Level Adjust
0 to -12dB
Level Adjust
�/A-Law/
Linear
0 to -12dB
Level Adjust
Ad
apt
i
v
e
Filt
er
Disable Tone
Detector
Disable Tone
Detector
Detector
Path Change
Instability
Detector

ZL50212
Data Sheet
10
Zarlink Semiconductor Inc.
1.1
Adaptive Filter
The adaptive filter adapts to the echo path and generates an estimate of the echo signal. This echo estimate is then
subtracted from Sin. For each group of echo cancellers, the adaptive filter is a 1024 tap FIR adaptive filter which is
divided into two sections. Each section contains 512 taps providing 64ms of echo estimation. In Normal
configuration, the first section is dedicated to channel A and the second section to channel B. In Extended Delay
configuration, both sections are cascaded to provide 128ms of echo estimation in channel A. In Back-to-Back
configuration, the first section is used in the receive direction and the second section is used in the transmit
direction for the same channel.
2.0
Double-Talk Detector
Double-Talk is defined as those periods of time when signal energy is present in both directions simultaneously.
When this happens, it is necessary to disable the filter adaptation to prevent divergence of the Adaptive Filter
coefficients. Note that when double-talk is detected, the adaptation process is halted but the echo canceller
continues to cancel echo using the previous converged echo profile. A double-talk condition exists whenever the
relative signal levels of Rin (Lrin) and Sin (Lsin) meet the following condition:
Lsin > Lrin + 20log
10
(DTDT)
where DTDT is the Double-Talk Detection Threshold. Lsin and Lrin are signal levels expressed in dBm0.
A different method is used when it is uncertain whether Sin consists of a low level double-talk signal or an echo
return. During these periods, the adaptation process is slowed down but it is not halted. The slow convergence speed
is set using the Slow sub-register in Control Register 4. During slow convergence, the adaptation speed is reduced
by a factor of 2
Slow
relative to normal convergence for non-zero values of Slow. If Slow equals zero, adaptation is
halted completely.
In the G.168 standard, the echo return loss is expected to be at least 6 dB. This implies that the Double-Talk Detector
Threshold (DTDT) should be set to 0.5 (-6 dB). However, in order to achieve additional guardband, the DTDT is set
internally to 0.5625 (-5 dB).
In some applications the return loss can be higher or lower than 6 dB. The EVP allows the user to change the
detection threshold to suit each application's need. This threshold can be set by writing the desired threshold value
into the DTDT register.
The DTDT register is 16 bits wide. The register value in hexadecimal can be calculated with the following equation:
DTDT
(hex)
= hex(DTDT
(dec)
* 32768)
where 0 < DTDT
(dec)
< 1
Example:
For DTDT = 0.5625 (-5 dB), the hexadecimal value becomes
hex(
0.5625 * 32768
)
= 4800
hex
2.1
Path Change Detector
Integrated into the EVP is a Path Change Detector. This permits fast reconvergence when a major change occurs
in the echo channel. Subtle changes in the echo channel are also tracked automatically once convergence is
achieved, but at a much slower speed.
The Path Change Detector is activated by setting the PathDet bit in Control Register 3 to "1". An optional path
clearing feature can be enabled by setting the PathClr bit in Control Register 3 to "1". With path clearing turned on,
the existing echo channel estimate will also be cleared (i.e. the adaptive filter will be filled with zeroes) upon detection
of a major path change.
Data Sheet
ZL50212
11
Zarlink Semiconductor Inc.
2.2
Non-Linear Processor (NLP)
After echo cancellation, there is always a small amount of residual echo which may still be audible. The EVP uses
Zarlink's patented Advanced NLP to remove residual echo signals which have a level lower than the Adaptive
Suppression Threshold (TSUP in G.168). This threshold depends upon the level of the Rin (Lrin) reference signal as
well as the programmed value of the Non-Linear Processor Threshold register (NLPTHR). TSUP can be calculated
by the following equation:
TSUP = Lrin + 20log
10
(NLPTHR)
where NLPTHR is the Non-Linear Processor Threshold register value and Lrin is the relative power level expressed
in dBm0. The NLPTHR register is 16 bits wide. The register value in hexadecimal can be calculated with the following
equation:
NLPTHR
(hex)
= hex(NLPTHR
(dec)
* 32768)
where 0 < NLPTHR
(dec)
< 1
When the level of residual error signal falls below TSUP, the NLP is activated further attenuating the residual signal
by an additional 30 dB. To prevent a perceived decrease in background noise due to the activation of the NLP, a
spectrally-shaped comfort noise, equivalent in power level to the background noise, is injected. This keeps the
perceived noise level constant. Consequently, the user does not hear the activation and de-activation of the NLP.
The NLP processor can be disabled by setting the NLPDis bit to "1" in Control Register 2.
The comfort noise injector can be disabled by setting the INJDis bit to "1" in Control Register 1. It should be noted
that the NLPTHR is valid and the comfort noise injection is active only when the NLP is enabled.
The patented Advanced NLP provides a number of new and improved features over the original NLP found in
previous generation devices. The differences between the Advanced NLP and the original NLP are summarized in
Table 1.
The NLPSel bit in Control Register 3 selects which NLP is used. A "1" will select the Advanced NLP, "0" selects the
original NLP.
The Advanced NLP uses a new noise ramping scheme to quickly and more accurately estimate the background
noise level. The noise ramping method of the original NLP can also be used. The InjCtrl bit in Control Register 3
selects the ramping scheme.
Feature
Register or Bit(s)
Advanced
NLP Default
Value
Original NLP
Default Value
NLP Selection
NLPSel (Control Register 3)
1
0 (feature
not supported)
Reject uncanceled echo as noise
NLRun1 (Control Register 3)
1
0 (feature
not supported)
Reject double-talk as noise
NLRun2 (Control Register 3)
1
0 (feature
not supported)
Noise level estimator ramping scheme
InjCtrl (Control Register 3)
1
0 (feature
not supported)
Noise level ramping rate
NLInc (Noise Control)
5(hex)
C(hex)
Noise level scaling
Noise Scaling
16(hex)
74(hex)
Table 1 - Comparison of NLP Types
ZL50212
Data Sheet
12
Zarlink Semiconductor Inc.
The NLInc sub-register in Noise Control is used to set the ramping speed. When InjCtrl = 1 (such as with the
Advanced NLP), a lower value will give faster ramping. When InjCtrl = 0 (such as with the original NLP), a higher
value will give faster ramping. NLInc is a 4-bit value, so only values from 0 to F(hex) are valid.
The Noise Scaling register can be used to adjust the relative volume of the comfort noise. Lowering this value will
scale the injected noise level down, conversely, raising the value will scale the comfort noise up. Due to differences
in the noise estimator operation, the Advanced NLP requires a different scaling value than the original NLP.
IMPORTANT NOTE: NLInc and the Noise Scaling register have been pre-programmed with G.168 compliant values.
Changing these values may result in undesirable comfort noise performance!
The Advanced NLP also contains safeguards to prevent double-talk and uncancelled echo from being mistaken for
background noise. These features were not present in the original NLP. They can be disabled by setting the NLRun1
and NLRun2 bits in Control Register 3 to "0".
2.3
Disable Tone Detector
The G.165 recommendation defines the disable tone as having the following characteristics: 2100 Hz (
�21Hz) sine
wave, a power level between -6 to -31 dBm0, and a phase reversal of 180 degrees (� 25 degrees) every 450 ms (�25
ms). If the disable tone is present for a minimum of one second with at least one phase reversal, the Tone Detector
will trigger.
The G.164 recommendation defines the disable tone as a 2100 Hz (+21 Hz) sine wave with a power level between
0 to -31 dBm0. If the disable tone is present for a minimum of 400 ms, with or without phase reversal, the Tone
Detector will trigger.
Each EVP has two Tone Detectors per channels (for a total of 64) in order to monitor the occurrence of a valid disable
tone on both Rin and Sin. Upon detection of a disable tone, TD bit of the Status Register will indicate logic high and
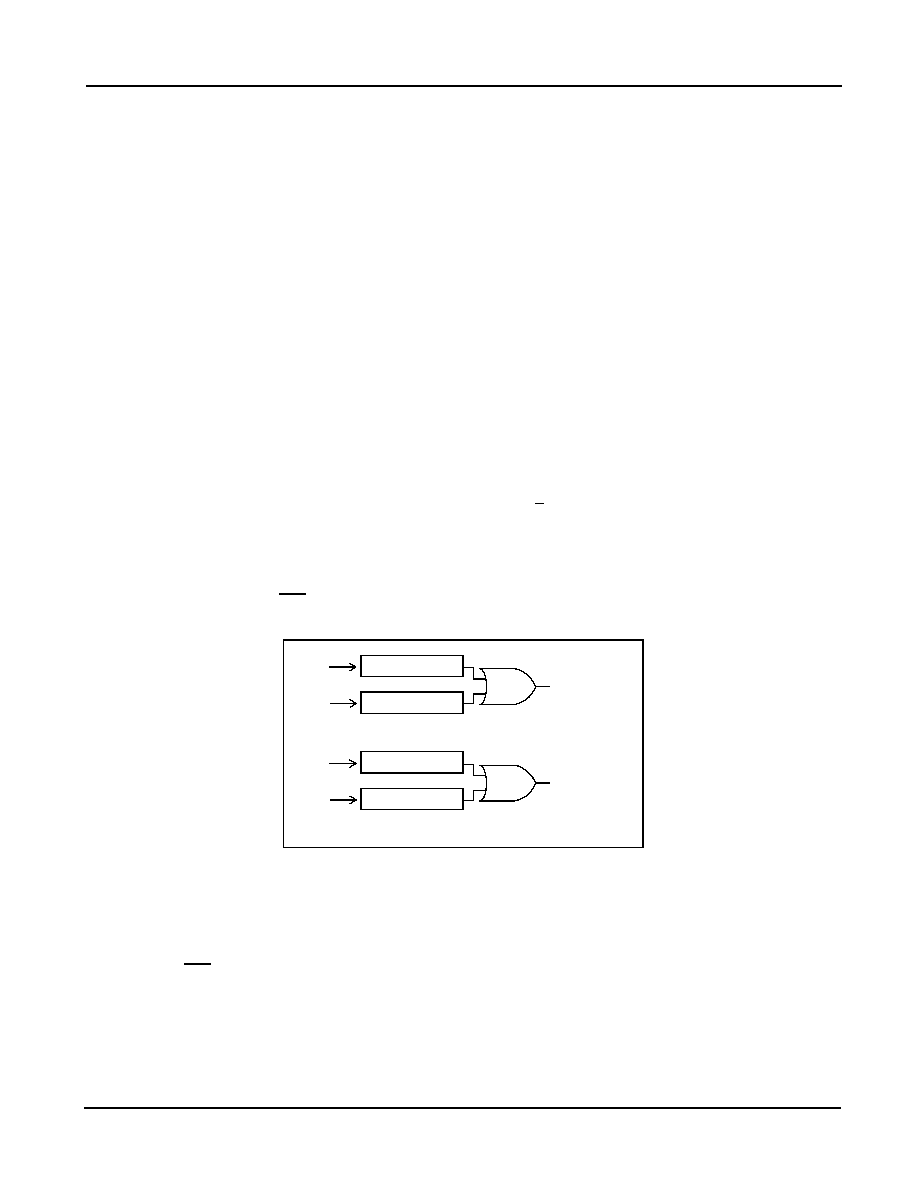
an interrupt is generated (i.e. IRQ pin low). Refer to Figure 5 and to the Interrupts section.
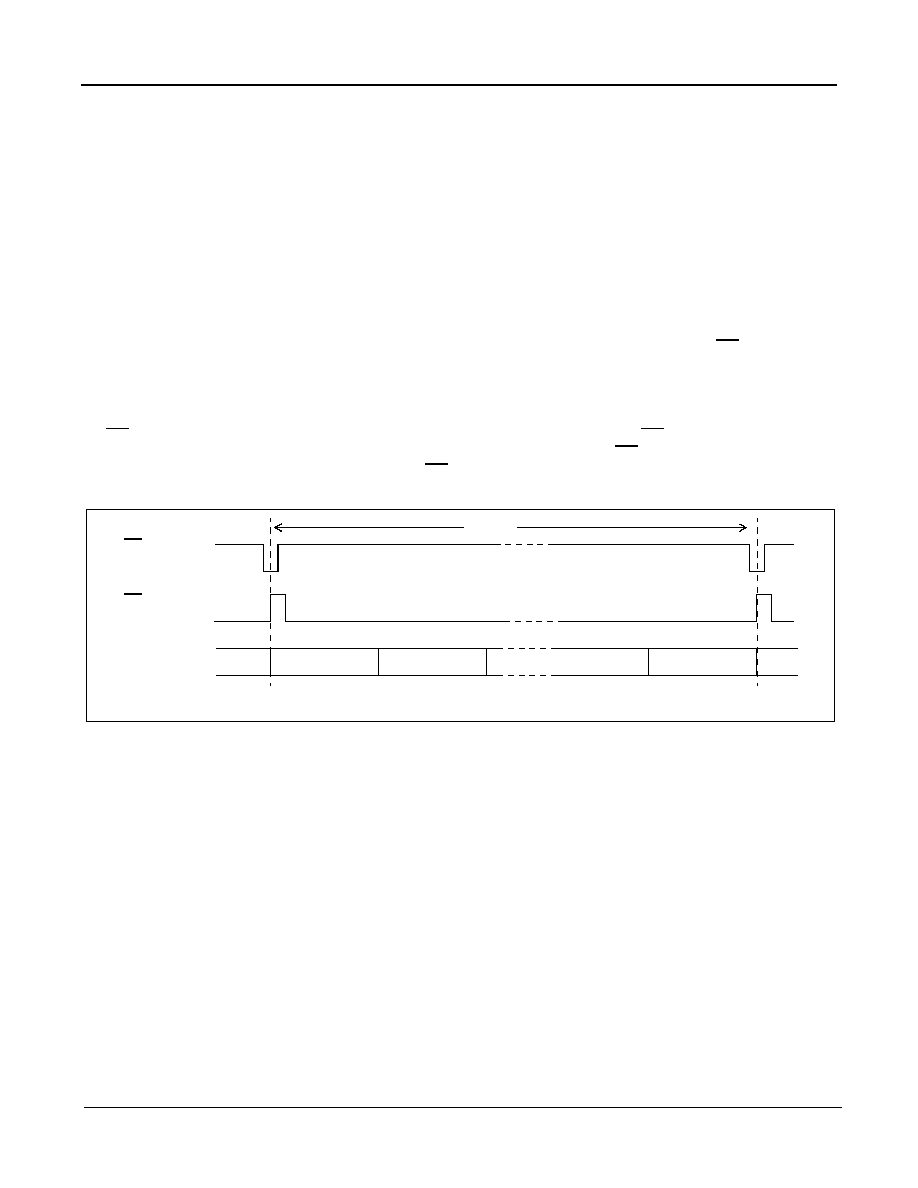
Figure 5 - Disable Tone Detection
Once a Tone Detector has been triggered, there is no longer a need for a valid disable tone (G.164 or G.165) to
maintain Tone Detector status (i.e. TD bit high). The Tone Detector status will only release (i.e. TD bit low) if the
signals Rin and Sin fall below -30 dBm0, in the frequency range of 390 Hz to 700 Hz, and below -34 dBm0, in the
frequency range of 700 Hz to 3400 Hz, for at least 400 ms. Whenever a Tone Detector releases, an interrupt is
generated (i.e. IRQ pin low).
The selection between G.165 and G.164 tone disable is controlled by the PHDis bit in Control Register 2 on a per
channel basis. When the PHDis bit is set to "1", G.164 tone disable requirements are selected.
In response to a valid disable tone, the echo canceller must be switched from the Enable Adaptation state to the
Bypass state. This can be done in two ways, automatically or externally. In automatic mode, the Tone Detectors
TD bit
Rin
Sin
Echo Canceller A
Tone
Detector
Tone
Detector
Status reg
ECA
TD
bit
Rin
Sin
Echo Canceller B
Tone
Detector
Tone
Detector
Status reg
ECB
Data Sheet
ZL50212
13
Zarlink Semiconductor Inc.
internally control the switching between Enable Adaptation and Bypass states. The automatic mode is activated by
setting the AutoTD bit in Control Register 2 to high. In external mode, an external controller is needed to service the
interrupts and poll the TD bits in the Status Registers. Following the detection of a disable tone (TD bit high) on a
given channel, the external controller must switch the echo canceller from Enable Adaptation to Bypass state.
2.4
Instability Detector
In systems with very low echo channel return loss (ERL), there may be enough feedback in the loop to cause stability
problems in the Adaptive Filter. This instability can result in variable pitched ringing or oscillation. Should this ringing
occur, the Instability Detector will activate and suppress the oscillations.
The Instability Detector is activated by setting the RingClr bit in Control Register 3 to "1".
2.5
Narrow Band Signal Detector (NBSD)
Single or dual frequency tones (i.e. DTMF tones) present in the receive input (Rin) of the echo canceller for a
prolonged period of time may cause the Adaptive Filter to diverge. The Narrow Band Signal Detector (NBSD) is
designed to prevent this by detecting single or dual tones of arbitrary frequency, phase, and amplitude. When narrow
band signals are detected, adaptation is halted but the echo canceller continues to cancel echo.
The NBSD will be active regardless of the EVP functional state. However the NBSD can be disabled by setting the
NBDis bit to "1" in Control Register 2.
2.6
Offset Null Filter
Adaptive filters in general do not operate properly when a DC offset is present at any input. To remove the DC
component, each EVP incorporates Offset Null filters in both Rin and Sin inputs.
The offset null filters can be disabled by setting the HPFDis bit to "1" in Control Register 2.
2.7
Adjustable Level Pads
The EVP provides adjustable level pads at Rin, Rout, Sin and Sout. This setup allows signal strength to be adjusted
both inside and outside the echo path. Each signal level may be independently scaled with anywhere from 0 to -12
dB level, in 3 dB steps. Level values are set using the Gains register.
CAUTION: Gain adjustment can help interface the ZL50212 to a particular system in order to provide optimum echo
cancellation, but it can also degrade performance if not done carefully. Excessive loss may cause low signal levels
and slow convergence. Exercise great care when adjusting these values.
The -12 dB PAD bit in Control Register 1 is still supported as a legacy feature. Setting this bit will provide 12 dB of
attenuation at Rin, and override the values in the Gains register.
2.8
ITU-T G.168 Compliance
The ZL50212 has been certified G.168 (1997), (2000) and (2002) compliant in all 64 ms cancellation modes
(i.e. Normal and Back-to-Back configurations) by in-house testing with the DSPG ECT-1 echo canceller tester.
The ZL50212 has also been tested for G.168 compliance and all voice quality tests at AT&T Labs. The ZL50212 was
classified as "carrier grade" echo canceller.
ZL50212
Data Sheet
14
Zarlink Semiconductor Inc.
3.0
EVP Configuration
The EVP architecture contains 32 echo cancellers divided into 16 groups. Each group has two echo cancellers which
can be individually controlled (Echo Canceller A (ECA) and Echo Canceller B (ECB). They can be set in three distinct
configurations: Normal, Back-to-Back, and Extended Delay. See Figures 6, 7, and 8.
3.1
Normal Configuration
In Normal configuration, the two echo cancellers (Echo Canceller A and B) are positioned in parallel, as shown in
Figure 6, providing 64 milliseconds of echo cancellation in two channels simultaneously.
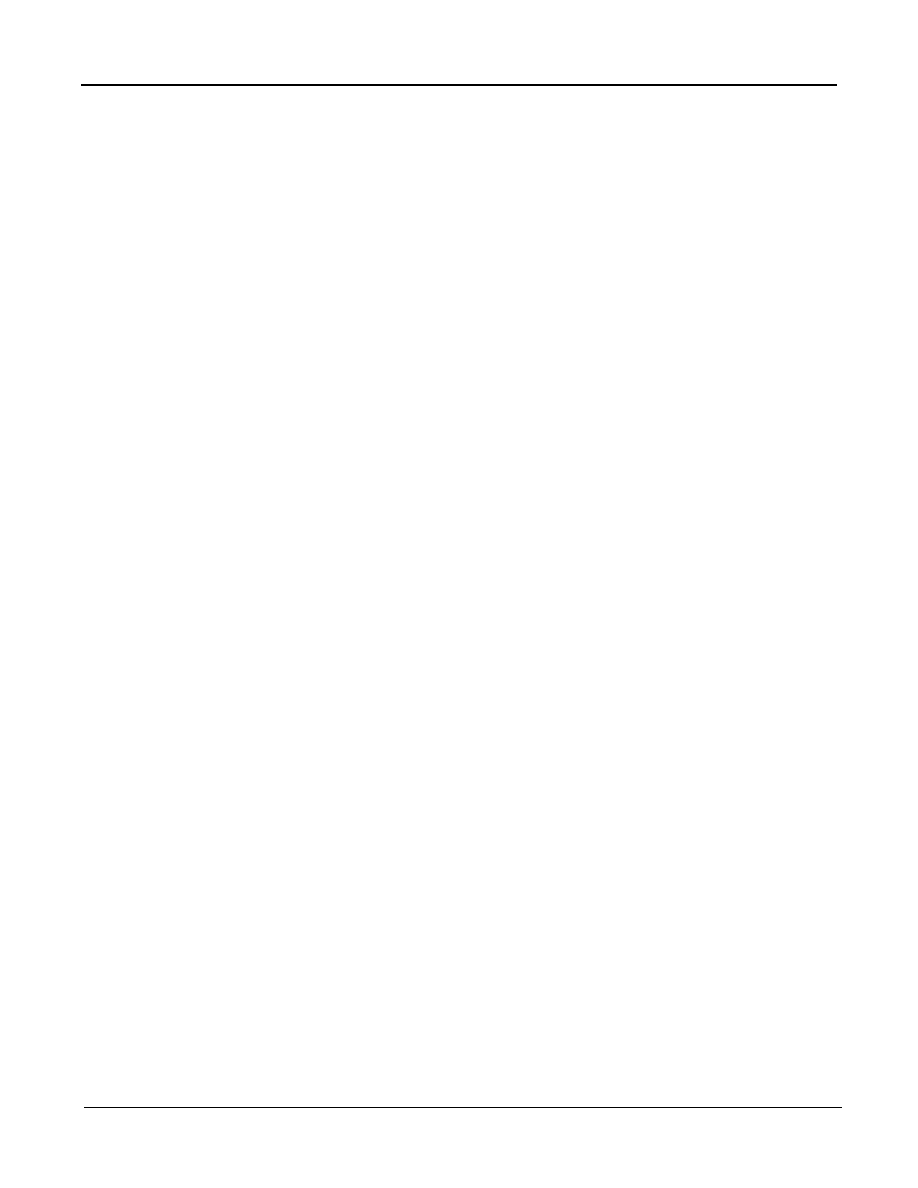
Figure 6 - Normal Device Configuration (64ms)
3.2
Back-to-Back Configuration
In Back-to-Back configuration, the two echo cancellers from the same group are positioned to cancel echo coming
from both directions in a single channel providing full-duplex 64ms echo cancellation. See Figure 7. This
configuration uses only one timeslot on PORT1 and PORT2 and the second timeslot normally associated with ECB
contains zero code. Back-to-Back configuration allows a no-glue interface for applications where bidirectional echo
cancellation is required.
Figure 7 - Back-to-Back Device Configuration (64ms)
Rin
Rout
Sout
Sin
echo
path A
echo
path B
+
-
channel A
channel A
+
-
channel B
channel B
ECA
ECB
Adaptive
Filter (64ms)
Adaptive
Filter (64ms)
PORT1
PORT2
+
ECA
Sin
Sout
Rout
Rin
-
ECB
+
-
echo
echo
path
path
Adaptive
Filter (64ms)
Adaptive
Filter (64ms)
PORT1
PORT2
Data Sheet
ZL50212
15
Zarlink Semiconductor Inc.
Back-to-Back configuration is selected by writing a "1" into the BBM bit of Control Register 1 for both Echo Canceller
A and Echo Canceller B for a given group of echo canceller. Table 4 shows the 16 groups of 2 cancellers that can
be configured into Back-to-Back.
Examples of Back-to-Back configuration include positioning one group of echo cancellers between a codec and a
transmission device or between two codecs for echo control on analog trunks.
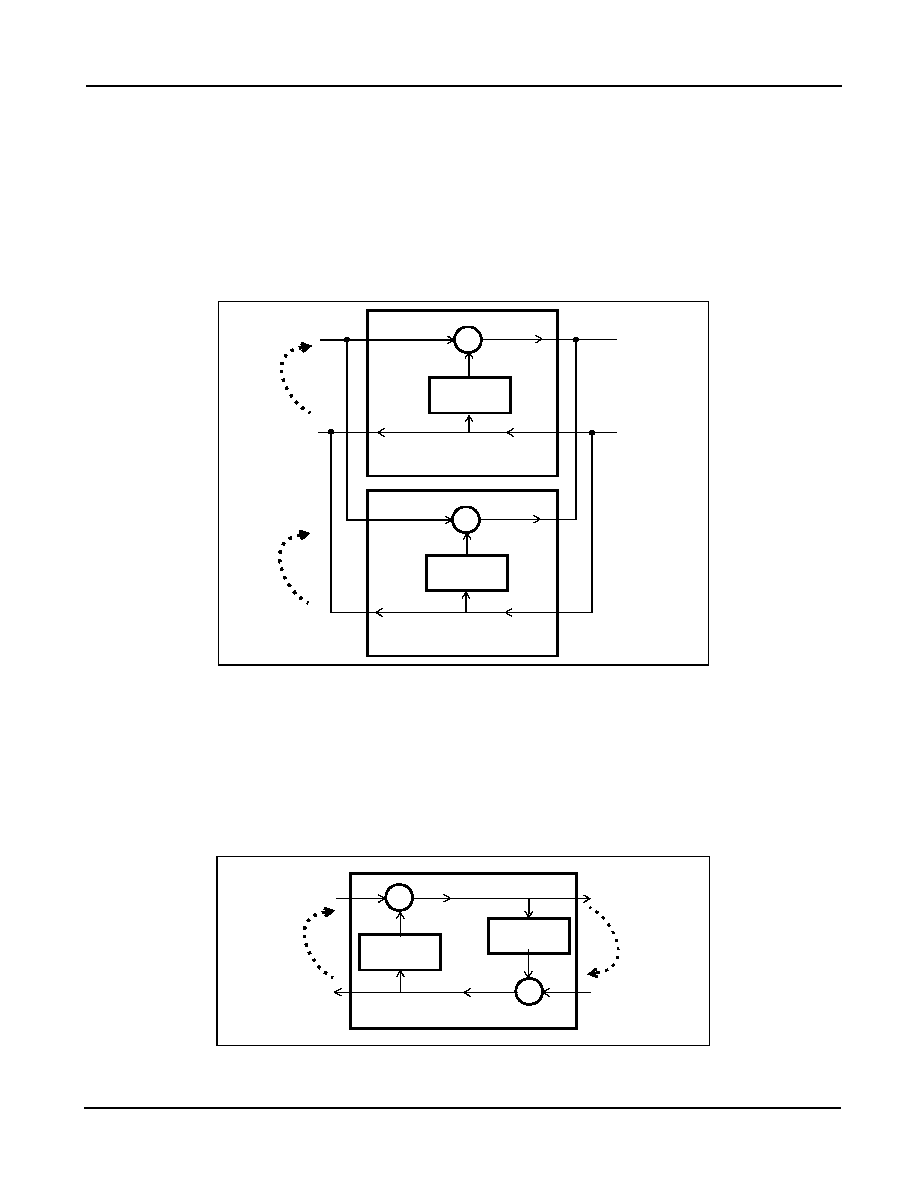
3.3
Extended Delay configuration
In this configuration, the two echo cancellers from the same group are internally cascaded into one 128 milliseconds
echo canceller. See Figure 8. This configuration uses only one timeslot on PORT1 and PORT2 and the second
timeslot normally associated with ECB contains quiet code.
Figure 8 - Extended Delay Configuration (128ms)
Extended Delay configuration is selected by writing a "1" into the ExtDl bit in Echo Canceller A, Control Register 1.
For a given group, only Echo Canceller A, Control Register 1, has the ExtDl bit. For Echo Canceller B Control
Register 1, Bit 0 must always be set to zero.
Table 4 shows the 16 groups of 2 cancellers that can each be configured into 64ms or 128ms echo tail capacity.
+
-
channel A
channel A
ECA
Sin
Sout
Rout
Rin
echo
path A
Adaptive Filter
(128 ms)
PORT1
PORT2

ZL50212
Data Sheet
16
Zarlink Semiconductor Inc.
4.0
Echo Canceller Functional States
Each echo canceller has four functional states: Mute, Bypass, Disable Adaptation and Enable Adaptation.
4.1
Mute
In Normal and in Extended Delay configurations, writing a "1" into the MuteR bit replaces Rin with quiet code which
is applied to both the Adaptive Filter and Rout. Writing a "1" into the MuteS bit replaces the Sout PCM data with quiet
code.
In Back-to-Back configuration, writing a "1" into the MuteR bit of Echo Canceller A, Control Register 2, causes
quiet code to be transmitted on Rout. Writing a "1" into the MuteS bit of Echo Canceller A, Control Register 2,
causes quiet code to be transmitted on Sout.
In Extended Delay and in Back-to-Back configurations, MuteR and MuteS bits of Echo Canceller B must always be
"0". Refer to Figure 4 and to Control Register 2 for bit description.
4.2
Bypass
The Bypass state directly transfers PCM codes from Rin to Rout and from Sin to Sout. When Bypass state is
selected, the Adaptive Filter coefficients are reset to zero. Bypass state must be selected for at least one frame
(125
�s) in order to properly clear the filter.
4.3
Disable Adaptation
When the Disable Adaptation state is selected, the Adaptive Filter coefficients are frozen at their current value. The
adaptation process is halted, however, the echo canceller continues to cancel echo.
4.4
Enable Adaptation
In Enable Adaptation state, the Adaptive Filter coefficients are continually updated. This allows the echo canceller
to model the echo return path characteristics in order to cancel echo. This is the normal operating state.
The echo canceller functions are selected in Control Register 1 and Control Register 2 through four control bits:
MuteS, MuteR, Bypass and AdaptDis. Refer to the EVP Registers Description for details.
LINEAR
16 bits
2's
complement
SIGN/
MAGNITUDE
�
-Law
A-Law
CCITT (G.711)
�
-Law
A-Law
+Zero
(quiet code)
0000
hex
80
hex
FF
hex
D5
hex
Table 2 - Quiet PCM Code Assignment
Data Sheet
ZL50212
17
Zarlink Semiconductor Inc.
5.0
Echo Voice Processor (EVP) Throughput Delay
The throughput delay of the EVP varies according to the device configuration. For all device configurations, Rin to
Rout has a delay of two frames and Sin to Sout has a delay of three frames. In Bypass state, the Rin to Rout and
Sin to Sout paths have a delay of two frames.
6.0
Serial PCM I/O channels
There are four TDM I/O streams, each with channels numbered from 0 to 31. One input stream is for Receive (Rin)
channels, and the other input stream is for Send (Sin) channels. Likewise, two output streams is for Rout PCM
channels, and Sout PCM channels. See Figure 9 for channel allocation.
6.1
Serial Data Interface Timing
The ZL50212 provides ST-BUS and GCI interface timing. The Serial Interface clock frequency, C4i, is 4.096 MHz.
The input and output data rate of the ST-BUS and GCI bus is 2.048 Mb/s.
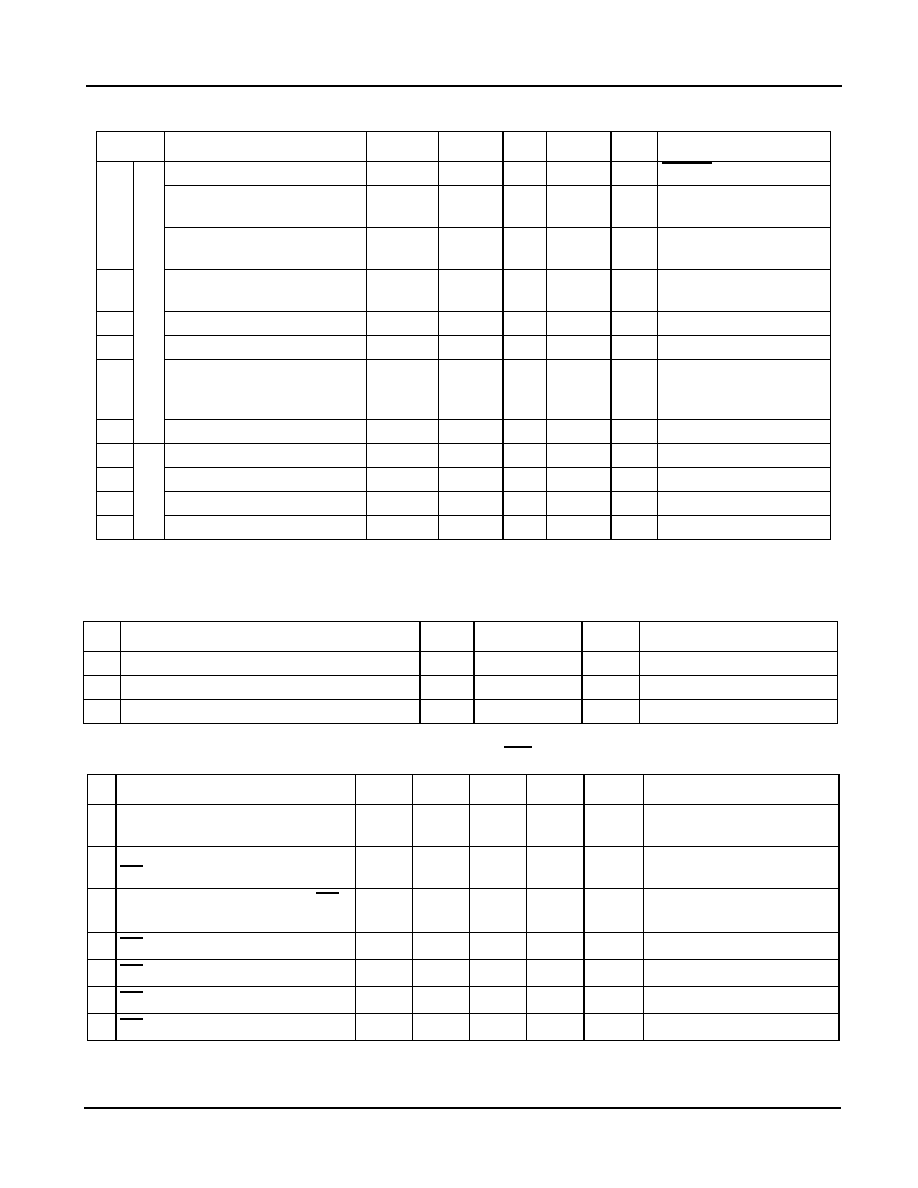
The 8 KHz input frame pulse can be in either ST-BUS or GCI format. The EVP automatically detects the presence
of an input frame pulse and identifies it as either ST-BUS or GCI. In ST-BUS format, every second falling edge of
the C4i clock marks a bit boundary, and the data is clocked in on the rising edge of C4i, three quarters of the way
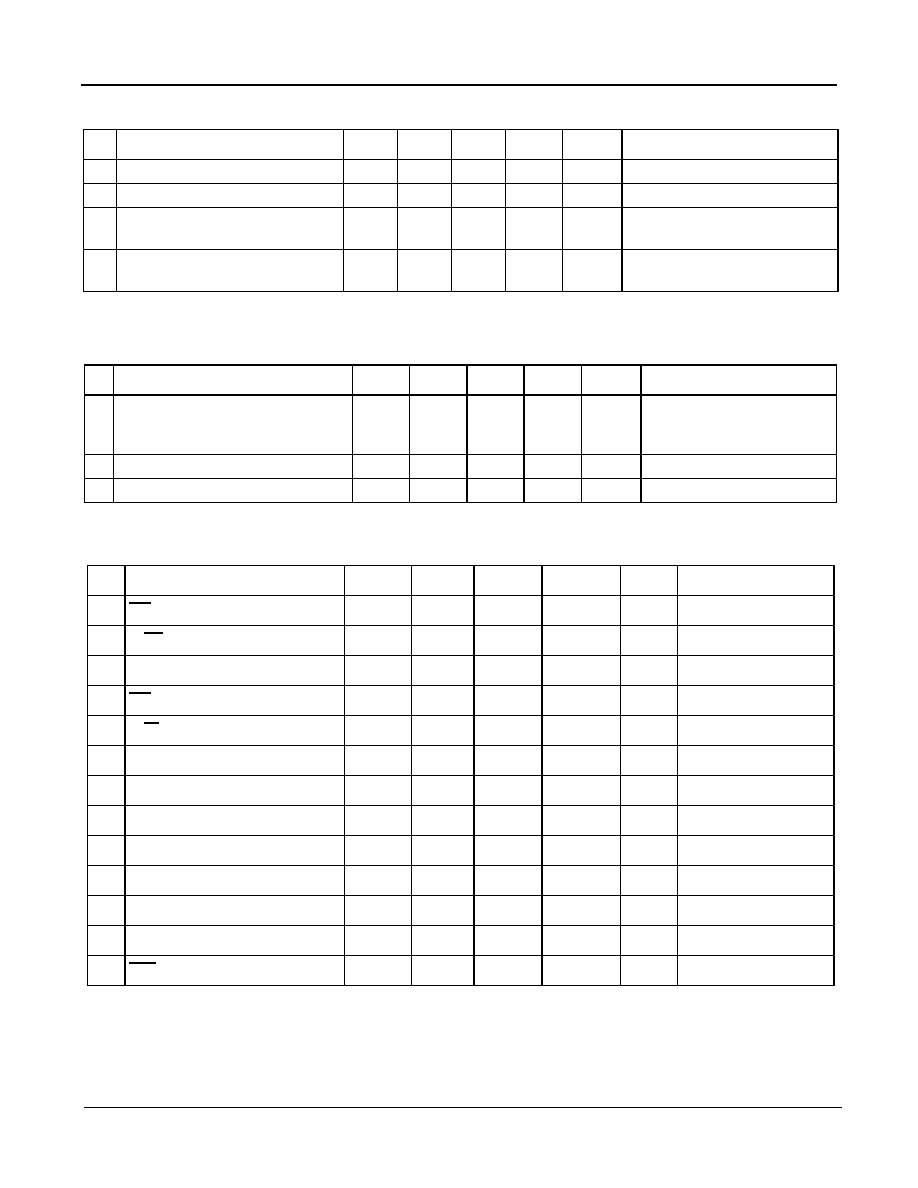
into the bit cell (See Figure 11). In GCI format, every second rising edge of the C4i clock marks the bit boundary,
and data is clocked in on the second falling edge of C4i, half the way into the bit cell (see Figure 12).
Figure 9 - ST-BUS and GCI Interface Channel Assignment for 2Mb/s Data Streams
F0i
Rin/Sin
Rout/Sout
Channel 31
Channel 0
125
�sec
Channel 1
Channel 30
ST-BUS
F0i
GCI interface
Note: Refer to Figure 11 and Figure 12 for timing details.
ZL50212
Data Sheet
18
Zarlink Semiconductor Inc.
Base
Address +
Echo Canceller A
Base
Address +
Echo Canceller B
MS
Byte
LS
Byte
MS
Byte
LS
Byte
-
00
hex
Control Reg 1
-
20
hex
Control Reg 1
-
01
hex
Control Reg 2
-
21
hex
Control
Reg
2
-
02
hex
Status Reg
-
22
hex
Status Reg
-
03
hex
Reserved
-
23
hex
Reserved
-
04
hex
Flat Delay Reg
-
24
hex
Flat Delay Reg
-
05
hex
Reserved
-
25
hex
Reserved
-
06
hex
Decay Step Size Reg
-
26
hex
Decay Step Size Reg
-
07
hex
Decay Step Number
-
27
hex
Decay Step Number
-
08
hex
Control Reg 3
-
28
hex
Control Reg 3
-
09
hex
Control Reg 4
-
29
hex
Control Reg 4
-
0A
hex
Noise Scaling
-
2A
hex
Noise Scaling
-
0B
hex
Noise Control
-
2B
hex
Noise Control
0D
hex
0C
hex
Rin Peak Detect Reg
2D
hex
2C
hex
Rin Peak Detect Reg
0F
hex
0E
hex
Sin Peak Detect Reg
2F
hex
2E
hex
Sin Peak Detect Reg
11
hex
10
hex
Error Peak Detect Reg
31
hex
30
hex
Error Peak Detect Reg
13
hex
12
hex
Reserved
33
hex
32
hex
Reserved
15
hex
14
hex
DTDT Reg
35
hex
34
hex
DTDT Reg
17
hex
16
hex
Reserved
37
hex
36
hex
Reserved
19
hex
18
hex
NLPTHR
39
hex
38
hex
NLPTHR
1B
hex
1A
hex
Step Size, MU
3B
hex
3A
hex
Step Size, MU
1D
hex
1C
hex
Gains
3D
hex
3C
hex
Gains
1F
hex
1E
hex
Reserved
3F
hex
3E
hex
Reserved
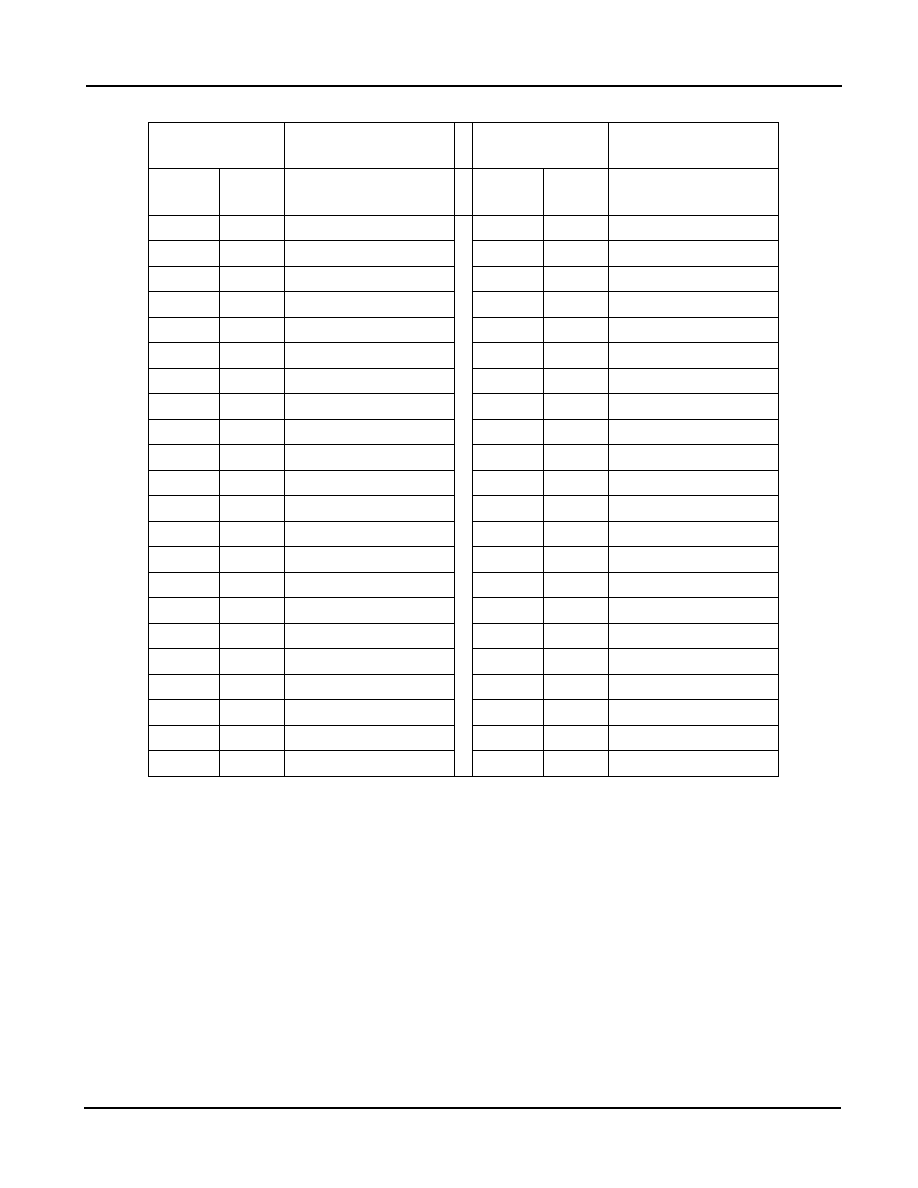
Table 3 - Memory Mapping of Per Channel Control and Status Registers
Data Sheet
ZL50212
19
Zarlink Semiconductor Inc.
7.0
Memory Mapped Control and Status registers
Internal memory and registers are memory mapped into the address space of the HOST interface. The internal dual
ported memory is mapped into segments on a "per channel" basis to monitor and control each individual echo
canceller and associated PCM channels. For example, in Normal configuration, echo canceller #5 makes use of
Echo Canceller B from group 2. It occupies the internal address space from 0A0
hex
to 0BF
hex
and interfaces to PCM
channel #5 on all serial PCM I/O streams.
As illustrated in Table 3, the "per channel" registers provide independent control and status bits for each echo
canceller. Figure 10 shows the memory map of the control/status register blocks for all echo cancellers of the EVP.
When Extended Delay or Back-to-Back configuration is selected, Control Register 1 of ECA and ECB and Control
Register 2 of the selected group of echo cancellers require special care. Refer to the Register description section.
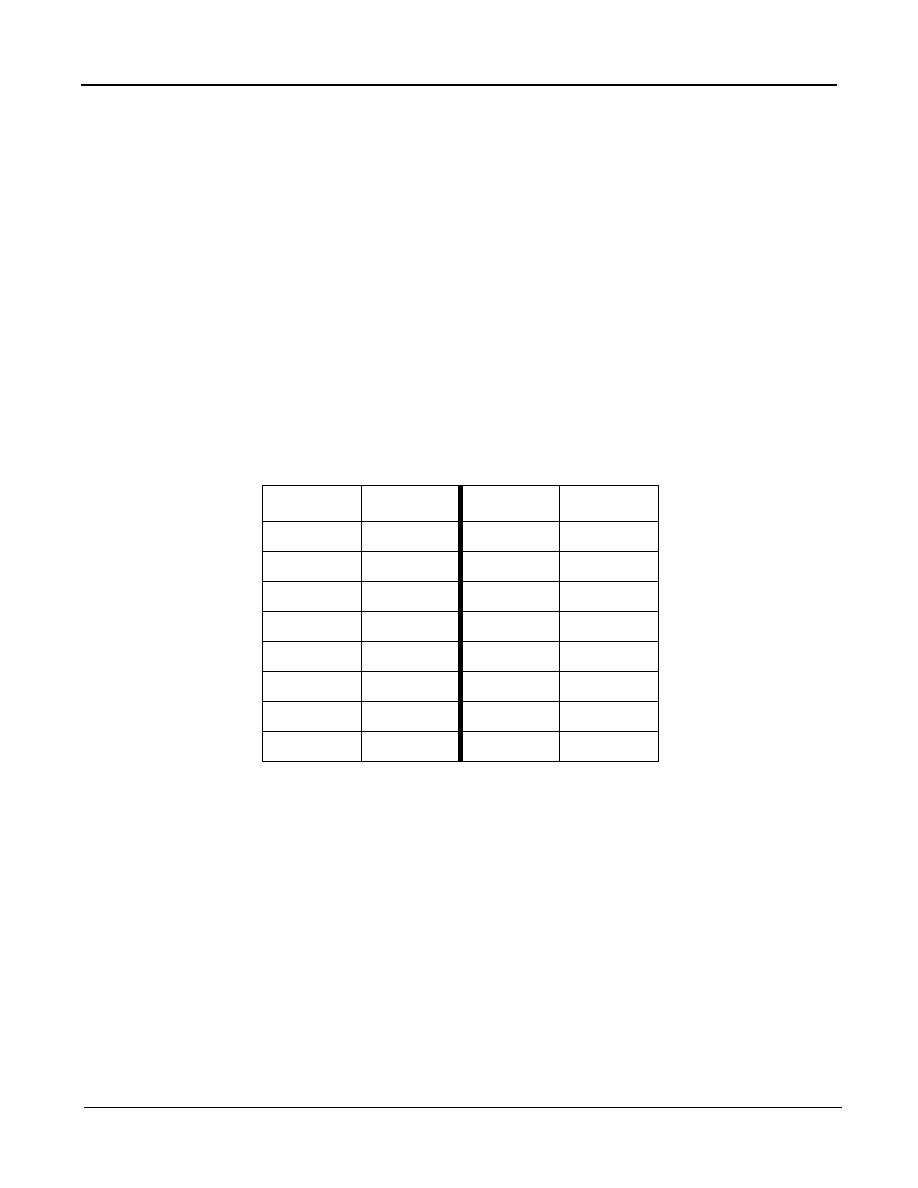
Table 4 is a list of the channels used for the 16 groups of echo cancellers when they are configured as Extended
Delay or Back-to-Back.
7.1
Normal Configuration
For a given group (group 0 to 15), 2 PCM I/O channels are used. For example, group 1 Echo Cancellers A and B,
channels 2 and 3 are active.
7.2
Extended Delay Configuration
For a given group (group 0 to 15), only one PCM I/O channel is active (Echo Canceller A) and the other channel
carries quiet code. For example, group 2, Echo Canceller A (Channel 4) will be active and Echo Canceller B
(Channel 5) will carry quiet code.
7.3
Back-to-Back Configuration
For a given group (group 0 to 15), only one PCM I/O channel is active (Echo Canceller A) and the other channel
carries quiet code. For example, group 5, Echo Canceller A (Channel 10) will be active and Echo Canceller B
(Channel 11) will carry quiet code.
Group
Channels
Group
Channels
0
0, 1
8
16, 17
1
2, 3
9
18, 19
2
4, 5
10
20, 21
3
6, 7
11
22, 23
4
8, 9
12
24, 25
5
10, 11
13
26, 27
6
12, 13
14
28, 29
7
14, 15
15
30, 31
Table 4 - Group and Channel allocation
ZL50212
Data Sheet
20
Zarlink Semiconductor Inc.
Figure 10 - Memory Mapping
7.4
Power Up Sequence
On power up, the RESET pin must be held low for 100
�s. Forcing the RESET pin low will put each EVP in power
down state. In this state, all internal clocks are halted, D<7:0>, Sout, Rout, DTA and IRQ pins are tristated. The 16
Main Control Registers, the Interrupt FIFO Register and the Test Register are reset to zero.
When the RESET pin returns to logic high and a valid MCLK is applied, the user must wait 500
�s for the PLL to lock.
C4i and F0i can be active during this period. Once the PLL has locked, the user must power up the 16 groups of
echo cancellers individually, by writing a "1" into the PWUP bit in each group of echo canceller's Main Control
Register.
For each group of echo cancellers, when the PWUP bit toggles from zero to one, echo cancellers A and B execute
their initialization routine. The initialization routine sets their registers, Base Address+00
hex
to Base Address+3F
hex
,
to the default power-up value and clears the Adaptive Filter coefficients. Two frames are necessary for the
initialization routine to execute properly.
Once the initialization routine is executed, the user can set the per channel Control Registers, Base Address+00
hex
to Base Address+3F
hex
, for the specific application.
7.5
Power management
Each group of echo cancellers can be placed in Power Down mode by writing a "0" into the PWUP bit in their
respective Main Control Register. When a given group is in Power Down mode, the corresponding PCM data are
bypassed from Rin to Rout and from Sin to Sout with two frames delay. Refer to the Main Control Register section
for description.
The typical power consumption can be calculated with the following equation:
P
C
= 9 * Nb_of_groups + 3.6, in mW
where 0
Nb_of_groups 16.
0000h -->
Channel 0, ECA Ctrl/Stat Registers
001Fh
0020h -->
Channel 1, ECB Ctrl/Stat Registers
003Fh
0040h -->
Channel 2, ECA Ctrl/Stat Registers
005Fh
0060h -->
Channel 3, ECB Ctrl/Stat Registers
007Fh
03C0h -->
Channel 30, ECA Ctrl/Stat Registers
03DFh
03E0h -->
Channel 31, ECB Ctrl/Stat Registers
03FFh
0400h --> 040Fh
Main Control Registers <15:0>
Group 0
Echo
Cancellers
Registers
Groups 2 --> 14
Echo Cancellers
Registers
Group 1
Echo
Cancellers
Registers
Group 15
Echo
Cancellers
Registers
0410h
Interrupt FIFO Register
0411h
Test Register
0412h ---> FFFFh
Reserved Test Register
Data Sheet
ZL50212
21
Zarlink Semiconductor Inc.
7.6
Call Initialization
To ensure fast initial convergence on a new call, it is important to clear the Adaptive Filter. This is done by putting
the echo canceller in bypass mode for at least one frame (125
�s) and then enabling adaptation.
Since the Narrow Band Detector is "ON" regardless of the functional state of the Echo Canceller it is recommended
that the Echo Cancellers are reset before any call progress tones are applied.
7.7
Interrupts
The EVP provides an interrupt pin (IRQ) to indicate to the HOST processor when a G.164 or G.165 Tone Disable is
detected and released.
Although each EVP may be configured to react automatically to tone disable status on any input PCM voice
channels, the user may want for the external HOST processor to respond to Tone Disable information in an
appropriate application-specific manner.
Each echo canceller will generate an interrupt when a Tone Disable occurs and will generate another interrupt when
a Tone Disable releases.
Upon receiving an IRQ, the HOST CPU should read the Interrupt FIFO Register. This register is a FIFO memory
containing the channel number of the echo canceller that has generated the interrupt.
All pending interrupts from any of the echo cancellers and their associated input channel number are stored in this
FIFO memory. The IRQ always returns high after a read access to the Interrupt FIFO Register. The IRQ pin will
toggle low for each pending interrupt.
After the HOST CPU has received the channel number of the interrupt source, the corresponding per channel Status
Register can be read from internal memory to determine the cause of the interrupt (see Table 3 for address mapping
of Status register). The TD bit indicates the presence of a Tone Disable.
The MIRQ bit 5 in the Main Control Register 0 masks interrupts from the EVP. To provide more flexibility, the MTDBI
(bit-4) and MTDAI (bit-3) bits in the Main Control Register<15:0> allow Tone Disable to be masked or unmasked
from generating an interrupt on a per channel basis. Refer to the Registers Description section.
ZL50212
Data Sheet
22
Zarlink Semiconductor Inc.
8.0
JTAG Support
The EVP JTAG interface conforms to the Boundary-Scan standard IEEE1149.1. This standard specifies a
design-for-testability technique called Boundary-Scan test (BST). The operation of the Boundary Scan circuitry is
controlled by an Test Access Port (TAP) controller. JTAG inputs are 3.3 Volts compliant only.
8.1
Test Access Port (TAP)
The TAP provides access to many test functions of the EVP. It consists of four input pins and one output pin. The
following pins are found on the TAP.
�
Test Clock Input (TCK)
The TCK provides the clock for the test logic. The TCK does not interfere with any on-chip clock and thus
remains independent. The TCK permits shifting of test data into or out of the Boundary-Scan register cells
concurrent with the operation of the device and without interfering with the on-chip logic.
�
Test Mode Select Input (TMS)
The logic signals received at the TMS input are interpreted by the TAP Controller to control the test
operations. The TMS signals are sampled at the rising edge of the TCK pulse. This pin is internally pulled to
V
DD1
when it is not driven from an external source.
�
Test Data Input (TDI)
Serial input data applied to this port is fed either into the instruction register or into a test data register,
depending on the sequence previously applied to the TMS input. Both registers are described in a
subsequent section. The received input data is sampled at the rising edge of TCK pulses. This pin is
internally pulled to V
DD1
when it is not driven from an external source.
�
Test Data Output (TDO)
Depending on the sequence previously applied to the TMS input, the contents of either the instruction
register or data register are serially shifted out towards the TDO. The data from the TDO is clocked on the
falling edge of the TCK pulses. When no data is shifted through the Boundary Scan cells, the TDO driver is
set to a high impedance state.
�
Test Reset (TRST)
This pin is used to reset the JTAG scan structure. This pin is internally pulled to V
SS
.
8.2
Instruction Register
In accordance with the IEEE 1149.1 standard, the EVP uses public instructions. The JTAG Interface contains a 3-bit
instruction register. Instructions are serially loaded into the instruction register from the TDI when the TAP Controller
is in its shifted-IR state. Subsequently, the instructions are decoded to achieve two basic functions: to select the test
data register that will operate while the instruction is current, and to define the serial test data register path, which is
used to shift data between TDI and TDO during data register scanning.
8.3
Test Data Registers
As specified in IEEE 1149.1, each of the Echo Voice Processor's JTAG Interface contains three test data registers:
�
Boundary-Scan register
The Boundary-Scan register consists of a series of Boundary-Scan cells arranged to form a scan path
around the boundary of each EVP core logic.
�
Bypass Register
The Bypass register is a single stage shift register that provides a one-bit path from TDI to TDO.
�
Device Identification register
The Device Identification register provides access to the following encoded information:
device version number, part number and manufacturer's name.
Data Sheet
ZL50212
23
Zarlink Semiconductor Inc.
* Exceeding these values may cause permanent damage. Functional operation under these conditions is not implied.
.
Typical figures are at 25
�
C and are for design aid only: not guaranteed and not subject to production testing
Absolute Maximum Ratings*
Parameter
Symbol
Min
Max
Units
1
I/O Supply Voltage (V
DD1
)
V
DD_IO
-0.5
5.0
V
2
Core Supply Voltage (V
DD2
)
V
DD_CORE
-0.5
2.5
V
3
Input Voltage
V
I3
V
SS
- 0.5
V
DD1
+0.5
V
4
Input Voltage on any 5V Tolerant I/O pins
V
I5
V
SS
- 0.3
7.0
V
5
Continuous Current at digital outputs
I
o
20
mA
6
Package power dissipation
P
D
3.0
W
7
Storage temperature
T
S
-55
150
�C
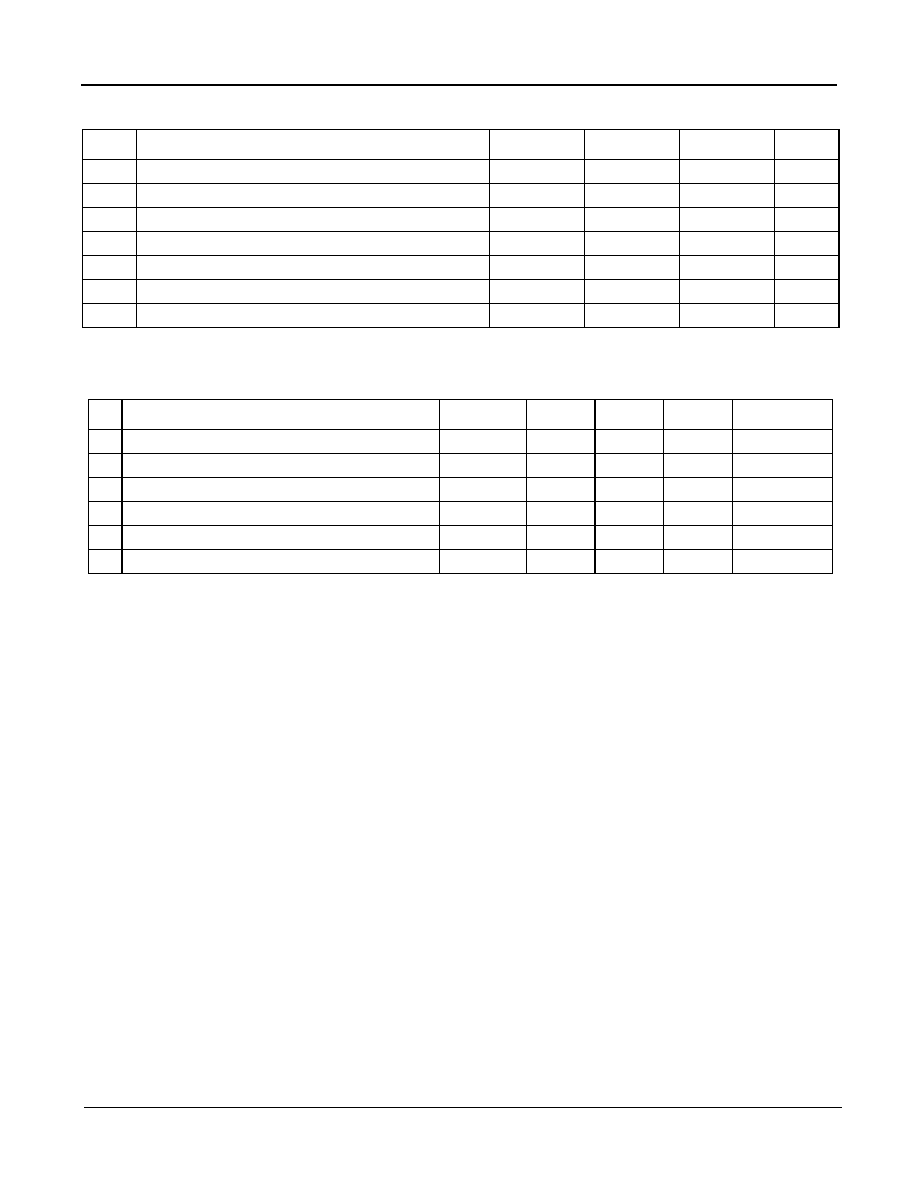
Recommended Operating Conditions
- Voltages are with respect to ground (Vss) unless otherwise stated
Characteristics
Sym
Min
Typ
Max
Units
1
Operating Temperature
T
OP
-40
+85
�C
2
I/O Supply Voltage (V
DD_IO
)
V
DD1
3.0
3.3
3.6
V
3
Core Supply Voltage (V
DD_CORE
)
V
DD2
1.6
1.8
2.0
V
4
Input High Voltage on 3.3V tolerant I/O
V
IH3
0.7V
DD1
V
DD1
V
5
Input High Voltage on 5V tolerant I/O pins
V
IH5
0.7V
DD1
5.5
V
6
Input Low Voltage
V
IL
0.3V
DD1
V
ZL50212
Data Sheet
24
Zarlink Semiconductor Inc.
Characteristics are over recommended operating conditions unless otherwise stated
Typical figures are at 25
�
C, V
DD1
=3.3V and are for design aid only: not guaranteed and not subject to production testing.
Characteristics are over recommended operating conditions unless otherwise stated
Characteristics are over recommended operating conditions unless otherwise stated
Typical figures are at 25
�
C, V
DD1
= 3.3V and for design aid only: not guaranteed and not subject to production testing
DC Electrical Characteristics
- Voltages are with respect to ground (V
ss
) unless otherwise stated.
Characteristics
Sym
Min
Typ
Max
Units
Test Conditions
1
I
N
P
U
T
S
Static Supply Current
I
CC
250
�A
RESET = 0
IDD_IO (V
DD1
= 3.3V)
Single EV Processor
I
DD_IO
10
mA 32 channels of single
EVP are active
IDD_CORE (V
DD2
= 1.8V)
Single EV Processor
I
DD_CORE
65
mA 32 channels of single
EVP are active
2
Power Consumption
P
C
1.35
W
All EVP's i.e. 288 chan-
nels are active
3
Input High Voltage
V
IH
0.7V
DD1
V
4
Input Low Voltage
V
IL
0.3V
DD1
V
5
Input Leakage
Input Leakage on Pullup
Input Leakage on Pulldown
I
IH
/I
IL
I
LU
I
LD
10
-100
100
�A
�A
�A
V
IN
=V
SS
to V
DD1
or 5.5V
V
IN
=V
SS
V
IN
=V
DD1
6
Input Pin Capacitance
C
I
10
pF
7
O
U
T
P
U
T
S
Output High Voltage
V
OH
0.8V
DD1
V
I
OH
= 12 mA
8
Output Low Voltage
V
OL
0.4
V
I
OL
= 12 mA
9
High Impedance Leakage
I
OZ
10
�A
V
IN
=V
SS
to 5.5V
10
Output Pin Capacitance
C
O
10
pF
AC Electrical Characteristics
- Timing Parameter Measurement Voltage Levels
- Voltages are with respect to ground (V
ss
) unless otherwise stated.
Characteristics
Sym
Level
Units
Conditions
1
CMOS Threshold
V
TT
0.5V
DD1
V
2
CMOS Rise/Fall Threshold Voltage High
V
HM
0.7V
DD1
V
3
CMOS Rise/Fall Threshold Voltage Low
V
LM
0.3V
DD1
V
AC Electrical Characteristics
- Frame Pulse and C4i
Characteristic
Sym
Min
Typ
Max
Units
Notes
1 Frame pulse width (ST-BUS, GCI)
t
FPW
20
2*
t
CP
-20
ns
2 Frame Pulse Setup time before
C4i falling (ST-BUS or GCI)
t
FPS
10
122
150
ns
3 Frame Pulse Hold Time from C4i
falling (ST-BUS or GCI)
t
FPH
10
122
150
ns
4 C4i Period
t
CP
190
244
300
ns
5 C4i Pulse Width High
t
CH
85
150
ns
6 C4i Pulse Width Low
t
CL
85
150
ns
7 C4i Rise/Fall Time
t
r
, t
f
10
ns
Data Sheet
ZL50212
25
Zarlink Semiconductor Inc.
Characteristics are over recommended operating conditions unless otherwise stated
Typical figures are at 25
�
C, V
DD1
= 3.3V and for design aid only: not guaranteed and not subject to production testing
Characteristics are over recommended operating conditions unless otherwise stated
Typical figures are at 25
�C, V
DD1
= 3.3V and for design aid only: not guaranteed and not subject to production testing
Characteristics are over recommended operating conditions unless otherwise stated
Typical figures are at 25
�
C, V
DD1
= 3.3V and for design aid only: not guaranteed and not subject to production testing
AC Electrical Characteristics
- Serial Streams for ST-BUS and GCI Backplanes
Characteristic
Sym
Min
Typ
Max
Units
Test Conditions
1
Rin/Sin Set-up Time
t
SIS
10
ns
2
Rin/Sin Hold Time
t
SIH
10
ns
3
Rout/Sout Delay
- Active to Active
t
SOD
60
ns
4
Output Data Enable (ODE)
Delay
t
ODE
30
ns
AC Electrical Characteristics
- Master Clock
- Voltages are with respect to ground (V
SS
). unless otherwise stated.
Characteristic
Sym
Min
Typ
Max
Units
Notes
1 Master Clock Frequency,
- Fsel = 0
- Fsel = 1
f
MCF0
f
MCF1
19.0
9.5
20.0
10.0
21.0
10.5
MHz
MHz
2 Master Clock Low
t
MCL
20
ns
3 Master Clock High
t
MCH
20
ns
AC Electrical Characteristics
- Motorola Non-Multiplexed Bus Mode
Characteristics
Sym
Min
Typ
Max
Units
Test Conditions
1
CS setup from DS falling
t
CSS
0
ns
2
R/W setup from DS falling
t
RWS
0
ns
3
Address setup from DS falling
t
ADS
0
ns
4
CS hold after DS rising
t
CSH
0
ns
5
R/W hold after DS rising
t
RWH
0
ns
6
Address hold after DS rising
t
ADH
0
ns
7
Data delay on read
t
DDR
79
ns
8
Data hold on read
t
DHR
3
15
ns
9
Data setup on write
t
DSW
0
ns
10 Data hold on write
t
DHW
0
ns
11 Acknowledgment delay
t
AKD
80
ns
12 Acknowledgment hold time
t
AKH
0
8
ns
13 IRQ delay
t
IRD
20
65
ns
ZL50212
Data Sheet
26
Zarlink Semiconductor Inc.
Figure 11 - ST-BUS Timing at 2.048 Mb/s
Figure 12 - GCI Interface Timing at 2.048 Mb/s
Figure 13 - Output Driver Enable (ODE)
Figure 14 - Master Clock
V
TT
V
TT
F0i
C4i
t
FPW
Rout/Sout
Rin/Sin
t
FPH
t
SOD
t
SIH
t
CH
t
CL
Bit 0, Channel 31
t
FPS
t
CP
t
SIS
V
TT
V
TT
Bit 7, Channel 0
Bit 6, Channel 0
Bit 5, Channel 0
Bit 0, Channel 31
Bit 7, Channel 0
Bit 6, Channel 0
Bit 5, Channel 0
V
HM
V
LM
t
r
t
f
V
TT
V
TT
F0i
C4i
t
FPW
Sout/Rout
Sin/Rin
t
FPH
t
SOD
t
SIH
t
CH
t
CL
Bit 7, Channel 31
t
FPS
t
CP
t
SIS
V
TT
V
TT
Bit 0, Channel 0
Bit 1, Channel 0
Bit 2, Channel 0
Bit 7, Channel 31
Bit 0, Channel 0
Bit 1, Channel 0
Bit 2, Channel 0
t
r
t
f
V
HM
V
LM
V
TT
HiZ
HiZ
Sout/Rout
ODE
t
ODE
t
ODE
Valid Data
V
TT
t
MCH
t
MCL
V
TT
MCLK
Data Sheet
ZL50212
27
Zarlink Semiconductor Inc.
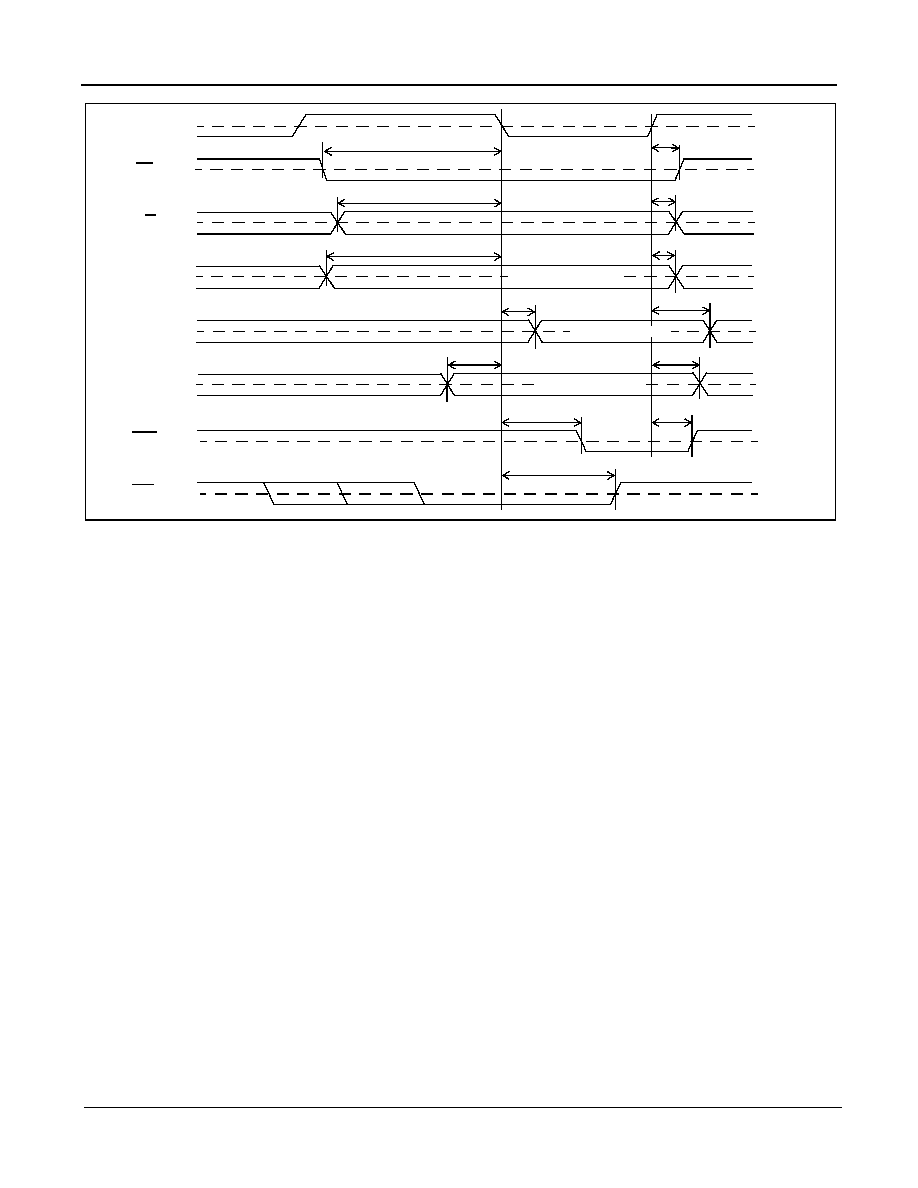
Figure 15 - Motorola Non-Multiplexed Bus Timing
DS
A0-A12
CS
D0-D7
D0-D7
READ
WRITE
t
CSS
t
CSH
t
ADH
t
DHR
t
RWS
R/W
t
ADS
t
RWH
t
DHW
t
AKD
t
DSW
t
DDR
t
AKH
DTA
V
TT
V
TT
V
TT
V
TT
V
TT
V
TT
V
TT
VALID ADDRESS
VALID READ DATA
VALID WRITE DATA
t
IRD
IRQ
V
TT
ZL50212
Data Sheet
28
Zarlink Semiconductor Inc.
9.0
EVP Registers Description
Note: In order to correctly write to Control Register 1 and 2 of ECB, it is necessary to write the data twice to the register, one
immediately after another. The two writes must be separated by at least 350ns and no more than 20us.
Echo Canceller A (ECA): Control Register 1
Power-up 00
hex
R/W Address: 00
hex
+ Base Address
Bit 7
Bit 6
Bit 5
Bit 4
Bit 3
Bit 2
Bit 1
Bit 0
Reset
INJDis
BBM
PAD
Bypass
AdpDis
0
ExtDI
Functional Description of Register Bits
Reset
When high, the power-up initialization is executed. This presets all register bits including
this bit and clears the Adaptive Filter coefficients.
INJDis
When high, the noise injection process is disabled. When low noise injection is enabled.
BBM
When high, the Back to Back configuration is enabled. When low, the Normal
configuration is enabled. Note: Do not enable Extended-Delay and BBM configurations at
the same time. Always set both BBM bits of the two echo cancellers (Control Register 1)
of the same group to the same logic value to avoid conflict.
PAD
When high, 12dB of attenuation is inserted into the Rin to Rout path. When low, the Gains
register controls the signal levels.
Bypass
When high, Sin data is by-passed to Sout and Rin data is by-passed to Rout. The
Adaptive Filter coefficients are set to zero and the filter adaptation is stopped. When low,
output data on both Sout and Rout is a function of the echo canceller algorithm.
AdpDis
When high, echo canceller adaptation is disabled. The Voice Processor cancels echo.
When low, the echo canceller dynamically adapts to the echo path characteristics.
0
Bits marked as "1" or "0" are reserved bits and should be written as indicated.
ExtDl
When high, Echo Cancellers A and B of the same group are internally cascaded into one
128ms echo canceller. When low, Echo Cancellers A and B of the same group operate
independently.
Echo Canceller B (ECB): Control Register 1
Power-up 02
hex
R/W Address: 20
hex
+ Base Address
Bit 7
Bit 6
Bit 5
Bit 4
Bit 3
Bit 2
Bit 1
Bit 0
Reset
INJDis
BBM
PAD
Bypass
AdpDis
1
0
Functional Description of Register Bits
Reset
When high, the power-up initialization is executed which presets all register bits including
this bit and clears the Adaptive Filter coefficients.
INJDis
When high, the noise injection process is disabled. When low, noise injection is enabled.
BBM
When high, the Back to Back configuration is enabled. When low, the Normal
configuration is enabled. Note: Do not enable Extended-Delay and BBM configurations at
the same time. Always set both BBM bits of the two echo cancellers (Control Register 1)
of the same group to the same logic value to avoid conflict.
PAD
When high, 12dB of attenuation is inserted into the Rin to Rout path. When low, the Gains
register controls the signal levels.
Bypass
When high, Sin data is by-passed to Sout and Rin data is by-passed to Rout. The
Adaptive Filter coefficients are set to zero and the filter adaptation is stopped. When low,
output data on both Sout and Rout is a function of the echo canceller algorithm.
AdpDis
When high, echo canceller adaptation is disabled. The Voice Processor cancels echo.
When low, the echo canceller dynamically adapts to the echo path characteristics.
1
Bits marked as "1" or "0" are reserved bits and should be written as indicated.
0
Control Register 1 (Echo Canceller B) Bit 0 is a reserved bit and should be written "0".
Data Sheet
ZL50212
29
Zarlink Semiconductor Inc.
Note: In order to correctly write to Control Register 1 and 2 of ECB, it is necessary to write the data twice to the register, one
immediately after another. The two writes must be separated by at least 350ns and no more than 20us.
Power-up
00
hex
ECA: Control Register 2
R/W Address:
01
hex
+ Base Address
ECB: Control Register 2
R/W Address:
21
hex
+ Base Address
Bit 7
Bit 6
Bit 5
Bit 4
Bit 3
Bit 2
Bit 1
Bit 0
TDis
PHDis
NLPDis
AutoTD
NBDis
HPFDis
MuteS
MuteR
Functional Description of Register Bits
TDis
When high, tone detection is disabled. When low, tone detection is enabled. When both
Echo Cancellers A and B TDis bits are high, Tone Disable processors are disabled
entirely and are put into Power Down mode.
PHDis
When high, the tone detectors will trigger upon the presence of a 2100 Hz tone regardless
of the presence/absence of periodic phase reversals. When low, the tone detectors will
trigger only upon the presence of a 2100 Hz tone with periodic phase reversals.
NLPDis
When high, the non-linear processor is disabled. When low, the non-linear processors
function normally. Useful for G.165 conformance testing.
AutoTD
When high, the echo canceller puts itself in Bypass mode when the tone detectors detect
the presence of 2100 Hz tone. See PHDis for qualification of 2100 Hz tones.
When low, the echo canceller algorithm will remain operational regardless of the state of
the 2100 Hz tone detectors.
NBDis
When high, the narrow-band detector is disabled. When low, the narrow-band detector is
enabled.
HPFDis
When high, the offset nulling high pass filters are bypassed in the Rin and Sin paths.
When low, the offset nulling filters are active and will remove DC offsets on PCM input
signals.
MuteS
When high, data on Sout is muted to quiet code. When low, Sout carries active code.
MuteR
When high, data on Rout is muted to quiet code. When low, Rout carries active code.
Power-up
00
hex
ECA: Status Register
R/W Address:
02
hex
+ Base Address
ECB: Status Register
R/W Address:
22
hex
+ Base Address
Bit 7
Bit 6
Bit 5
Bit 4
Bit 3
Bit 2
Bit 1
Bit 0
Reserve
TD
DTDet
Reserve
Reserve
Reserve
TDG
NB
Functional Description of Register Bits
Reserve
Reserved bit.
TD
Logic high indicates the presence of a 2100Hz tone.
DTDet
Logic high indicates the presence of a double-talk condition.
Reserve
Reserved bit.
Reserve
Reserved bit.
Reserve
Reserved bit.
TDG
Tone detection status bit gated with the AutoTD bit (Control Register 2).
Logic high indicates that AutoTD has been enabled and the tone detector has detected
the presence of a 2100Hz tone.
NB
Logic high indicates the presence of a narrow-band signal on Rin.
ZL50212
Data Sheet
30
Zarlink Semiconductor Inc.
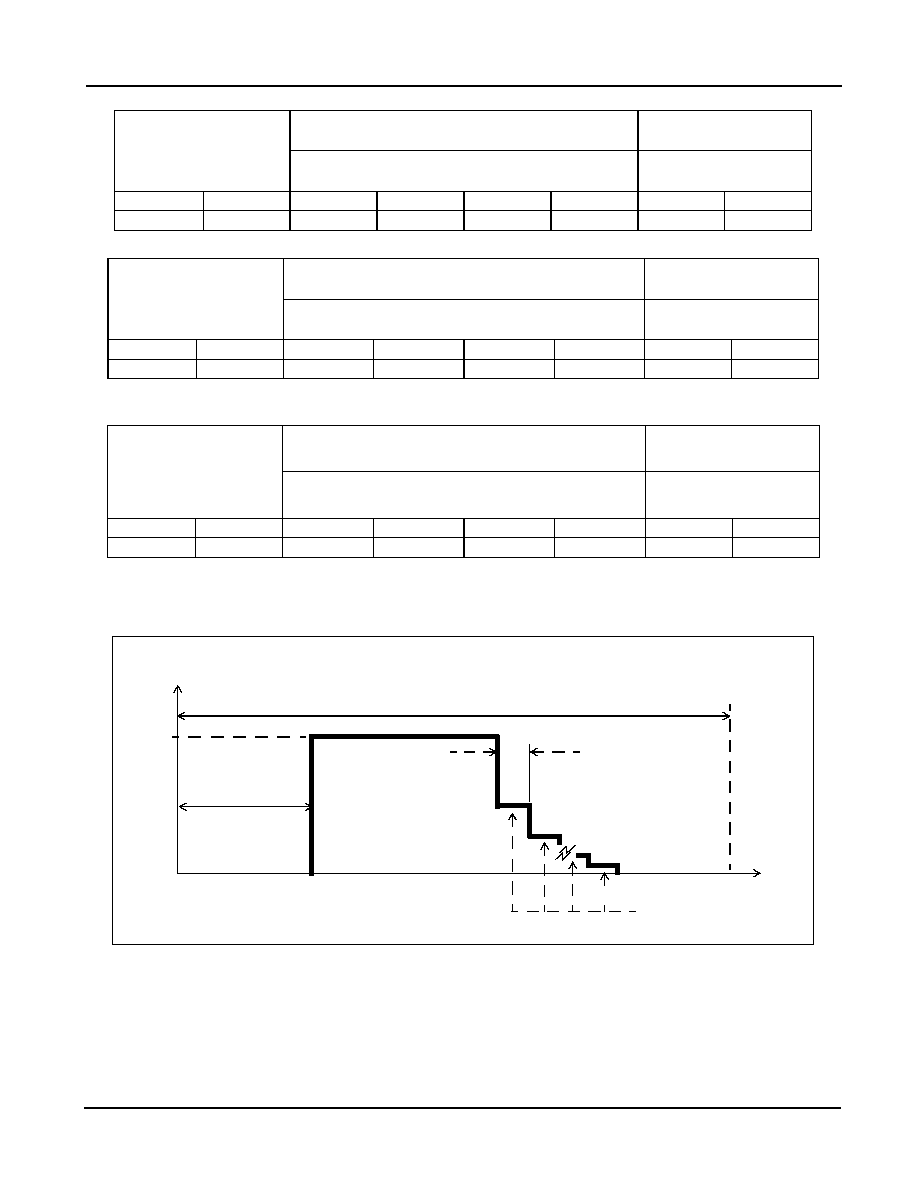
Figure 16 - The MU Profile
Power-up
00
hex
ECA: Flat Delay Register (FD)
R/W Address:
04
hex
+ Base Address
ECB: Flat Delay Register (FD)
R/W Address:
24
hex
+ Base Address
Bit 7
Bit 6
Bit 5
Bit 4
Bit 3
Bit 2
Bit 1
Bit 0
FD7
FD6
FD5
FD4
FD3
FD2
FD1
FD0
Power-up
00
hex
ECA: Decay Step Number Register (NS)
R/W Address:
07
hex
+ Base Address
ECB: Decay Step Number Register (NS)
R/W Address:
27
hex
+ Base Address
Bit 7
Bit 6
Bit 5
Bit 4
Bit 3
Bit 2
Bit 1
Bit 0
NS7
NS6
NS5
NS4
NS3
NS2
NS1
NS0
Power-up
00
hex
ECA: Decay Step Size Control Register
(SSC)
R/W Address:
06
hex
+ Base Address
ECB: Decay Step Size Control Register
(SSC)
R/W Address:
26
hex
+ Base Address
Bit 7
Bit 6
Bit 5
Bit 4
Bit 3
Bit 2
Bit 1
Bit 0
0
0
0
0
0
SSC2
SSC1
SSC0
Note: Bits marked with "0" are reserved bits and should be written "0"
Amplitude of MU
Time
Flat Delay (FD
7-0
)
Step Size (SS)
1.0
2
-16
FIR Filter Length (512 or 1024 taps)
Number of Steps (NS
7-0
)

Data Sheet
ZL50212
31
Zarlink Semiconductor Inc.
Functional Description of Register Bits
The Exponential Decay registers (Decay Step Number and Decay Step Size) and Flat Delay register allow the LMS
adaptation step-size (MU) to be programmed over the length of the FIR filter. A programmable MU profile allows the
performance of the echo canceller to be optimized for specific applications. For example, if the characteristic of the
echo response is known to have a flat delay of several milliseconds and a roughly exponential decay of the echo
impulse response, then the MU profile can be programmed to approximate this expected impulse response thereby
improving the convergence characteristics of the Adaptive Filter. Note that in the following register descriptions, one
tap is equivalent to 125
�s (64ms/512 taps).
FD
7-0
Flat Delay
:
This register defines the flat delay of the MU profile, (i.e., where the MU value is 2
-16
). The
delay is defined as FD
7-0
x 8 taps. For example; If FD
7-0
= 5, then MU=2
-16
for the first 40 taps of the
echo canceller FIR filter. The valid range of FD
7-0
is: 0
FD
7-0
64 in normal mode and 0 FD
7-0
128
in extended-delay mode. The default value of FD
7-0
is zero.
SSC
2-0
Decay Step Size Control
:
This register controls the step size (SS) to be used during the exponential
decay of MU. The decay rate is defined as a decrease of MU by a factor of 2 every SS taps of the FIR
filter, where SS = 4 x2
SSC
2-0
. For example; If SSC
2-0
= 4, then MU is reduced by a factor of 2 every 64
taps of the FIR filter. The default value of SSC
2-0
is 04
hex
.
NS
7-0
Decay Step Number: This register defines the number of steps to be used for the decay of MU where
each step has a period of SS taps (see SSC
2-0
). The start of the exponential decay is defined as: Filter
Length (512 or 1024) - [Decay Step Number (NS
7-0
) x Step Size (SS)] where SS = 4 x2
SSC
2-0
.
For example; If NS
7-0
=4 and SSC
2-0
=4, then the exponential decay start value is 512 - [NS
7-0
x SS] =
512 - [4 x (4x2
4
)] = 256 taps for a filter length of 512 taps.
ZL50212
Data Sheet
32
Zarlink Semiconductor Inc.
The Table 5 below is the same Table shown on page 11.
Power-up
FB
hex
ECA: Control Register 3
R/W Address:
08
hex
+ Base Address
ECB: Control Register 3
R/W Address:
28
hex
+ Base Address
Bit 7
Bit 6
Bit 5
Bit 4
Bit 3
Bit 2
Bit 1
Bit 0
NLRun2
InjCtrl
NLRun1
RingClr
Reserve
PathClr
PathDet
NLPSel
Functional Description of Register Bits
NLRun2
When high, the comfort noise level estimator actively rejects double-talk as being background
noise. When low, the noise level estimator makes no such distinction.
InjCtrl
Selects which noise ramping scheme is used. See Table below.
NLRun1
When high, the comfort noise level estimator actively rejects uncancelled echo as being
background noise. When low, the noise level estimator makes no such distinction.
RingClr
When high, the instability detector is activated. When low, the instability detector is disabled.
Reserve
Reserved bit. Must always be set to one for normal operation.
PathClr
When high, the current echo channel estimate will be cleared and the echo canceller will enter
fast convergence mode upon detection of a path change. When low, the echo canceller will keep
the current path estimate but revert to fast convergence mode upon detection of a path change.
Note: this bit is ignored if PathDet is low.
PathDet
When high, the path change detector is activated. When low, the path change detector is
disabled.
NLPSel
When high, the Advanced NLP is selected. When low, the original NLP is selected.
Feature
Register or Bit(s)
Advanced
NLP Default
Value
Original NLP
Default Value
NLP Selection
NLPSel (Control Register 3)
1
0 (feature
not supported)
Reject uncancelled echo as noise
NLRun1 (Control Register 3)
1
0 (feature
not supported)
Reject double-talk as noise
NLRun2 (Control Register 3)
1
0 (feature
not supported)
Noise level estimator ramping
scheme
InjCtrl (Control Register 3)
1
0 (feature
not supported)
Noise level ramping rate
NLInc (Noise Control)
5
hex
C
hex
Noise level scaling
Noise Scaling
16
hex
74
hex
Table 5 - Comparison of the NLP Types
Data Sheet
ZL50212
33
Zarlink Semiconductor Inc.
Power-up
54
hex
ECA: Control Register 4
R/W Address:
09
hex
+ Base Address
ECB: Control Register 4
R/W Address:
29
hex
+ Base Address
Bit 7
Bit 6
Bit 5
Bit 4
Bit 3
Bit 2
Bit 1
Bit 0
0
SD2
SD1
SD0
0
Slow2
Slow1
Slow0
Functional Description of Register Bits
0
Must be set to zero.
SupDec
These three bits (SD2,SD1,SD0) control how long the echo canceller remains in a fast
convergence state following a path change, Reset or Bypass operation. A value of zero will keep
the echo canceller in fast convergence indefinitely.
0
Must be set to zero.
Slow
Slow convergence mode speed adjustment.(Bits Slow2, Slow1,Slow0)
For Slow = 1, 2,..., 7, slow convergence speed is reduced by a factor of 2
Slow
as compared to
normal adaptation.
For Slow = 0, no adaptation occurs during slow convergence.
Power-up
16
hex
ECA: Noise Scaling (NS)
R/W Address:
0A
hex
+ Base Address
ECB: Noise Scaling (NS)
R/W Address:
2A
hex
+ Base Address
Bit 7
Bit 6
Bit 5
Bit 4
Bit 3
Bit 2
Bit 1
Bit 0
NS7
NS6
NS5
NS4
NS3
NS2
NS1
NS0
Functional Description of Register Bits
This register is used to scale the comfort noise up or down. Larger values will increase the relative level of
comfort noise. The default value of 16
hex
will provide G.168 compliance with the Advanced NLP. A value of
74
hex
is recommended if the original NLP is used.
Power-up
45
hex
ECA: Noise Control
R/W Address:
0B
hex
+ Base Address
ECB: Noise Control
R/W Address:
2B
hex
+ Base Address
Bit 7
Bit 6
Bit 5
Bit 4
Bit 3
Bit 2
Bit 1
Bit 0
Reserve
Reserve
Reserve
Reserve
NLInc3
NLInc2
NLInc1
NLInc0
Functional Description of Register Bits
Reserve
Reserved bits. Must be set to 4
hex
for normal operation.
NLInc
Noise level estimator ramping rate. When InjCtrl = 1, a lower value will give faster ramping.
When InjCtrl = 0, a higher value will give faster ramping. The default value of 5
hex
will provide
G.168 compliance with InjCtrl = 1. A value of C
hex
is recommended if InjCtrl = 0.
ZL50212
Data Sheet
34
Zarlink Semiconductor Inc.
Power-up
N/A
ECA: Rin Peak Detect Register 2 (RP)
R/W Address:
0D
hex
+ Base Address
ECB: Rin Peak Detect Register 2 (RP)
R/W Address:
2D
hex
+ Base Address
Bit 7
Bit 6
Bit 5
Bit 4
Bit 3
Bit 2
Bit 1
Bit 0
RP15
RP14
RP13
RP12
RP11
RP10
RP9
RP8
Power-up
N/A
ECA: Rin Peak Detect Register 1 (RP)
R/W Address:
0C
hex
+ Base Address
ECB: Rin Peak Detect Register 1 (RP)
R/W Address:
2C
hex
+ Base Address
Bit 7
Bit 6
Bit 5
Bit 4
Bit 3
Bit 2
Bit 1
Bit 0
RP7
RP6
RP5
RP4
RP3
RP2
RP1
RP0
Functional Description of Register Bits
These peak detector registers allow the user to monitor the receive in (Rin) peak signal level. The information
is in 16-bit 2's complement linear coded format presented in two 8 bit registers for each echo canceller. The
high byte is in Register 2 and the low byte is in Register 1.
Power-up
N/A
ECA: Sin Peak Detect Register 2 (SP)
R/W Address:
0F
hex
+ Base Address
ECB: Sin Peak Detect Register 2 (SP)
R/W Address:
2F
hex
+ Base Address
Bit 7
Bit 6
Bit 5
Bit 4
Bit 3
Bit 2
Bit 1
Bit 0
SP15
SP14
SP13
SP12
SP11
SP10
SP9
SP8
Power-up
N/A
ECA: Sin Peak Detect Register 1 (SP)
R/W Address:
0E
hex
+ Base Address
ECB: Sin Peak Detect Register 1 (SP)
R/W Address:
2E
hex
+ Base Address
Bit 7
Bit 6
Bit 5
Bit 4
Bit 3
Bit 2
Bit 1
Bit 0
SP7
SP6
SP5
SP4
SP3
SP2
SP1
SP0
Functional Description of Register Bits
These peak detector registers allow the user to monitor the send in (Sin) peak signal level. The information is in
16-bit 2's complement linear coded format presented in two 8 bit registers for each echo canceller. The high
byte is in Register 2 and the low byte is in Register 1.

Data Sheet
ZL50212
35
Zarlink Semiconductor Inc.
Power-up
N/A
ECA: Error Peak Detect Register 2 (EP)
R/W Address:
11
hex
+ Base Address
ECB: Error Peak Detect Register 2 (EP)
R/W Address:
31
hex
+ Base Address
Bit 7
Bit 6
Bit 5
Bit 4
Bit 3
Bit 2
Bit 1
Bit 0
EP15
EP14
EP13
EP12
EP11
EP10
EP9
EP8
Power-up
N/A
ECA: Error Peak Detect Register 1 (EP)
R/W Address:
10
hex
+ Base Address
ECB: Error Peak Detect Register 1 (EP)
R/W Address:
30
hex
+ Base Address
Bit 7
Bit 6
Bit 5
Bit 4
Bit 3
Bit 2
Bit 1
Bit 0
EP7
EP6
EP5
EP4
EP3
EP2
EP1
EP0
Functional Description of Register Bits
These peak detector registers allow the user to monitor the error signal peak level. The information is in 16-bit
2's complement linear coded format presented in two 8 bit registers for each echo canceller. The high byte is in
Register 2 and the low byte is in Register 1.
Power-up
48
hex
ECA: Double-Talk Detection Threshold
Register 2
R/W Address:
15
hex
+ Base Address
ECB: Double-Talk Detection Threshold
Register 2
R/W Address:
35
hex
+ Base Address
Bit 7
Bit 6
Bit 5
Bit 4
Bit 3
Bit 2
Bit 1
Bit 0
DTDT15
DTDT14
DTDT13
DTDT12
DTDT11
DTDT10
DTDT9
DTDT8
Power-up
00
hex
ECA: Double-Talk Detection Threshold
Register 1
R/W Address:
14
hex
+ Base Address
ECB: Double-Talk Detection Threshold
Register 1
R/W Address:
34
hex
+ Base Address
Bit 7
Bit 6
Bit 5
Bit 4
Bit 3
Bit 2
Bit 1
Bit 0
DTDT7
DTDT6
DTDT5
DTDT4
DTDT3
DTDT2
DTDT1
DTDT0
Functional Description of Register Bits
This register allows the user to program the level of Double-Talk Detection Threshold (DTDT). The 16 bit 2's
complement linear value defaults to 4800
hex
= 0.5625 or -5 dB. The maximum value is 7FFF
hex
= 0.9999 or 0
dB. The high byte is in Register 2 and the low byte is in Register 1.
ZL50212
Data Sheet
36
Zarlink Semiconductor Inc.
Power-up
0C
hex
ECA: Non-Linear Processor Threshold
Register 2 (NLPTHR)
R/W Address:
19
hex
+ Base Address
ECB: Non-Linear Processor Threshold
Register 2 (NLPTHR)
R/W Address:
39
hex
+ Base Address
Bit 7
Bit 6
Bit 5
Bit 4
Bit 3
Bit 2
Bit 1
Bit 0
NLP15
NLP14
NLP13
NLP12
NLP11
NLP10
NLP9
NLP8
Power-up
E0
hex
ECA: Non-Linear Processor Threshold
Register 1 (NLPTHR)
R/W Address:
18
hex
+ Base Address
ECB: Non-Linear Processor Threshold
Register 1 (NLPTHR)
R/W Address:
38
hex
+ Base Address
Bit 7
Bit 6
Bit 5
Bit 4
Bit 3
Bit 2
Bit 1
Bit 0
NLP7
NLP6
NLP5
NLP4
NLP3
NLP2
NLP1
NLP0
Functional Description of Register Bits
This register allows the user to program the level of the Non-Linear Processor Threshold (NLPTHR). The 16 bit
2's complement linear value defaults to 0CE0
hex
= 0.1 or -20.0 dB. The maximum value is 7FFF
hex
= 0.9999 or
0 dB. The high byte is in Register 2 and the low byte is in Register 1.
Power-up
40
hex
ECA: Adaptation Step Size Register 2
(MU)
R/W Address:
1B
hex
+ Base Address
ECB: Adaptation Step Size Register 2
(MU)
R/W Address:
3B
hex
+ Base Address
Bit 7
Bit 6
Bit 5
Bit 4
Bit 3
Bit 2
Bit 1
Bit 0
MU15
MU14
MU13
MU12
MU11
MU10
MU9
MU8
Power-up
00
hex
ECA: Adaptation Step Size Register 1
(MU)
R/W Address:
1A
hex
+ Base Address
ECB: Adaptation Step Size Register 1
(MU)
R/W Address:
3A
hex
+ Base Address
Bit 7
Bit 6
Bit 5
Bit 4
Bit 3
Bit 2
Bit 1
Bit 0
MU7
MU6
MU5
MU4
MU3
MU2
MU1
MU0
Functional Description of Register Bits
This register allows the user to program the level of MU. MU is a 16 bit 2's complement value which defaults to
4000
hex
= 1.0 The maximum value is 7FFF
hex
or 1.9999 decimal. The high byte is in Register 2 and the low byte
is in Register 1.
Data Sheet
ZL50212
37
Zarlink Semiconductor Inc.
Power-up
44
hex
ECA: Gains Register 2
R/W Address:
1D
hex
+ Base Address
ECB: Gains Register 2
R/W Address:
3D
hex
+ Base Address
Bit 7
Bit 6
Bit 5
Bit 4
Bit 3
Bit 2
Bit 1
Bit 0
0
Rin2
Rin1
Rin0
0
Rout2
Rout1
Rout0
Power-up
44
hex
ECA: Gains Register 1
R/W Address:
1C
hex
+ Base Address
ECB: Gains Register 1
R/W Address:
3C
hex
+ Base Address
Bit 7
Bit 6
Bit 5
Bit 4
Bit 3
Bit 2
Bit 1
Bit 0
0
Sin2
Sin1
Sin0
0
Sout2
Sout1
Sout0
Functional Description of Register Bits
This register is used to select gain values on RIN, ROUT, SIN and SOUT. Gains has the following structure:
RIN ROUT SIN SOUT
Gains = 0xxx 0xxx 0xxx 0xxx
= 0100 0100 0100 0100 (4444
hex
) default
Gains is split into four groups of four bits. Each group maps to a different signal port (as indicated above), and
has three gain bits. The following table indicates how these gain bits are used:
Bit2 Bit1 Bit0 Gain Level
1 0 0
0 dB (default)
0 1 1 -3 dB
0 1 0 -6 dB
0 0 1 -9 dB
0 0 0 -12 dB
Note that the -12 dB PAD bit in Control Register 1 provides 12 dB of attenuation in the Rin to Rout path, and
will override the settings in Gains.
ZL50212
Data Sheet
38
Zarlink Semiconductor Inc.
Main Control Register 0 (EC Group 0)
Power-up 00
hex
R/W Address: 400
hex
Bit 7
Bit 6
Bit 5
Bit 4
Bit 3
Bit 2
Bit 1
Bit 0
WR_all
ODE
MIRQ
MTDBI
MTDAI
Format
Law
PWUP
Functional Description of Register Bits
WR_all
Write all control bit: When high, Group 0-15 Echo Cancellers Registers are mapped into 0000
hex
to 0003F
hex
which is Group 0 address mapping. Useful to initialize the 16 Groups of Echo
Cancellers as per Group 0. When low, address mapping is per Figure 10. Note: Only the Main
Control Register 0 has the WR_all bit
ODE
Output Data Enable: This control bit is logically AND'd with the ODE input pin. When both ODE bit
and ODE input pin are high, the Rout and Sout outputs are enabled. When the ODE bit is low or
the ODE input pin is low, the Rout and Sout outputs are high impedance
.
Note: Only the Main
Control Register 0 has the ODE bit.
MIRQ
Mask Interrupt: When high, all the interrupts from the Tone Detectors output are masked. The
Tone Detectors operate as specified in their Echo Canceller B, Control Register 2.
When low, the Tone Detectors Interrupts are active.
Note: Only the Main Control Register 0 has the MIRQ bit.
MTDBI
Mask Tone Detector B Interrupt: When high, the Tone Detector interrupt output from Echo
Canceller B is masked. The Tone Detector operates as specified in Echo Canceller B, Control
Register 2. When low, the Tone Detector B Interrupt is active.
MTDAI
Mask Tone Detector A Interrupt: When high, the Tone Detector interrupt output from Echo
Canceller A is masked. The Tone Detector operates as specified in Echo Canceller A, Control
Register 2. When low, the Tone Detector A Interrupt is active.
Format
ITU-T/Sign Mag: When high, both Echo Cancellers A and B for a given group, accept ITU-T
(G.711) PCM code. When low, both Echo Cancellers A and B for a given group, accept
sign-magnitude PCM code.
Law
A/
� Law: When high, both Echo Cancellers A and B for a given group, accept A-Law companded
PCM code. When low, both Echo Cancellers A and B for a given group, accept
�-Law companded
PCM code.
PWUP
Power-UP: When high, both Echo Cancellers A and B and Tone Detectors for a given group, are
active. When low, both Echo Cancellers A and B and Tone Detectors for a given group, are placed
in Power Down mode. In this mode, the corresponding PCM data are bypassed from Rin to Rout
and from Sin to Sout with two frames delay. When the PWUP bit toggles from zero to one, the
echo canceller A and B execute their initialization routine which presets their registers, Base
Address+00
hex
to Base Address+3F
hex
, to the default power up value and clears the Adaptive
Filter coefficients. Two frames are necessary for the initialization routine to execute properly. Once
the initialization routine is executed, the user can set the per channel Control Registers for their
specific application.
Data Sheet
ZL50212
39
Zarlink Semiconductor Inc.
Main Control Register 1 (EC Group 1)
R/W Address: 401hex
Main Control Register 2 (EC Group 2)
R/W Address: 402hex
Main Control Register 3 (EC Group 3)
R/W Address: 403hex
Main Control Register 4 (EC Group 4)
R/W Address: 404hex
Main Control Register 5 (EC Group 5)
R/W Address: 405hex
Main Control Register 6 (EC Group 6)
R/W Address: 406hex
Main Control Register 7 (EC Group 7)
R/W Address: 407hex
Main Control Register 8 (EC Group 8)
R/W Address: 408hex
Main Control Register 9 (EC Group 9)
R/W Address: 409hex
Main Control Register 10 (EC Group 10)
R/W Address: 40Ahex
Main Control Register 11 (EC Group 11)
R/W Address: 40Bhex
Main Control Register 12 (EC Group 12)
R/W Address: 40Chex
Main Control Register 13 (EC Group 13)
R/W Address: 40Dhex
Main Control Register 14 (EC Group 14)
R/W Address: 40Ehex
Main Control Register 15 (EC Group 15)
R/W Address: 40Fhex
Power-up 00
hex
Bit 7
Bit 6
Bit 5
Bit 4
Bit 3
Bit 2
Bit 1
Bit 0
Unused
Unused
Unused
MTDBI
MTDAI
Format
Law
PWUP
Functional Description of Register Bits
Unused
Unused Bits.
MTDBI
Mask Tone Detector B Interrupt: When high, the Tone Detector interrupt output from Echo Canceller
B is masked. The Tone Detector operates as specified in Echo Canceller B, Control Register 2.
When low, the Tone Detector B Interrupt is active.
MTDAI
Mask Tone Detector A Interrupt: When high, the Tone Detector interrupt output from Echo Canceller
A is masked. The Tone Detector operates as specified in Echo Canceller A, Control Register 2.
When low, the Tone Detector A Interrupt is active.
Format
ITU-T/Sign Mag: When high, both Echo Cancellers A and B for a given group, select ITU-T (G.711)
PCM code. When low, both Echo Cancellers A and B for a given group, select sign-magnitude PCM
code
.
Law
A/
� Law: When high, both Echo Cancellers A and B for a given group, select A-Law companded
PCM code. When low, both Echo Cancellers A and B for a given group, select
�-Law companded
PCM code
.
PWUP
Power-UP: When high, both Echo Cancellers A and B and Tone Detectors for a given group, are
active. When low, both Echo Cancellers A and B and Tone Detectors for a given group, are placed
in Power Down mode. In this mode, the corresponding PCM data are bypassed from Rin to Rout
and from Sin to Sout with two frames delay. When the PWUP bit toggles from zero to one, the
echo cancellers A and B execute their initialization routine which presets their registers, Base
Address+00
hex
to Base Address+3F
hex
, to the default Reset Value and clears the Adaptive Filter
coefficients. Two frames are necessary for the initialization routine to execute properly. Once the
initialization routine is executed, the user can set the per channel Control Registers for their specific
application.
ZL50212
Data Sheet
40
Zarlink Semiconductor Inc.
Interrupt FIFO Register
Power-up 00
hex
R/W Address: 410
hex
Bit 7
Bit 6
Bit 5
Bit 4
Bit 3
Bit 2
Bit 1
Bit 0
IRQ
0
0
I4
I3
I2
I1
I0
Functional Description of Register Bits
IRQ
Logic high indicates an interrupt has occurred. IRQ bit is cleared after the Interrupt FIFO register
is read. Logic Low indicates that no interrupt is pending and the FIFO is empty.
0
Unused bit. Always zero.
0
Unused bit. Always zero.
I<4:0>
I<4:0> binary code indicates the channel number at which a Tone Detector state change has
occurred. Note: Whenever a Tone Disable is detected or released, an interrupt is generated.
Test Register
Power-up 00
hex
R/W Address: 411
hex
Bit 7
Bit 6
Bit 5
Bit 4
Bit 3
Bit 2
Bit 1
Bit 0
Reserve
Reserve
Reserve
Reserve
Reserve
Reserve
Reserve
Tirq
Functional Description of Register Bits
Reserve
Reserved bits. Must always be set to zero for normal operation.
Tirq
Test IRQ: Useful for the application engineer to verify the interrupt service routine. When high,
any change to MTDBI and MTDAI bits of the Main Control Register will cause an interrupt and its
corresponding channel number will be available from the Interrupt FIFO Register. When low,
normal operation is selected.
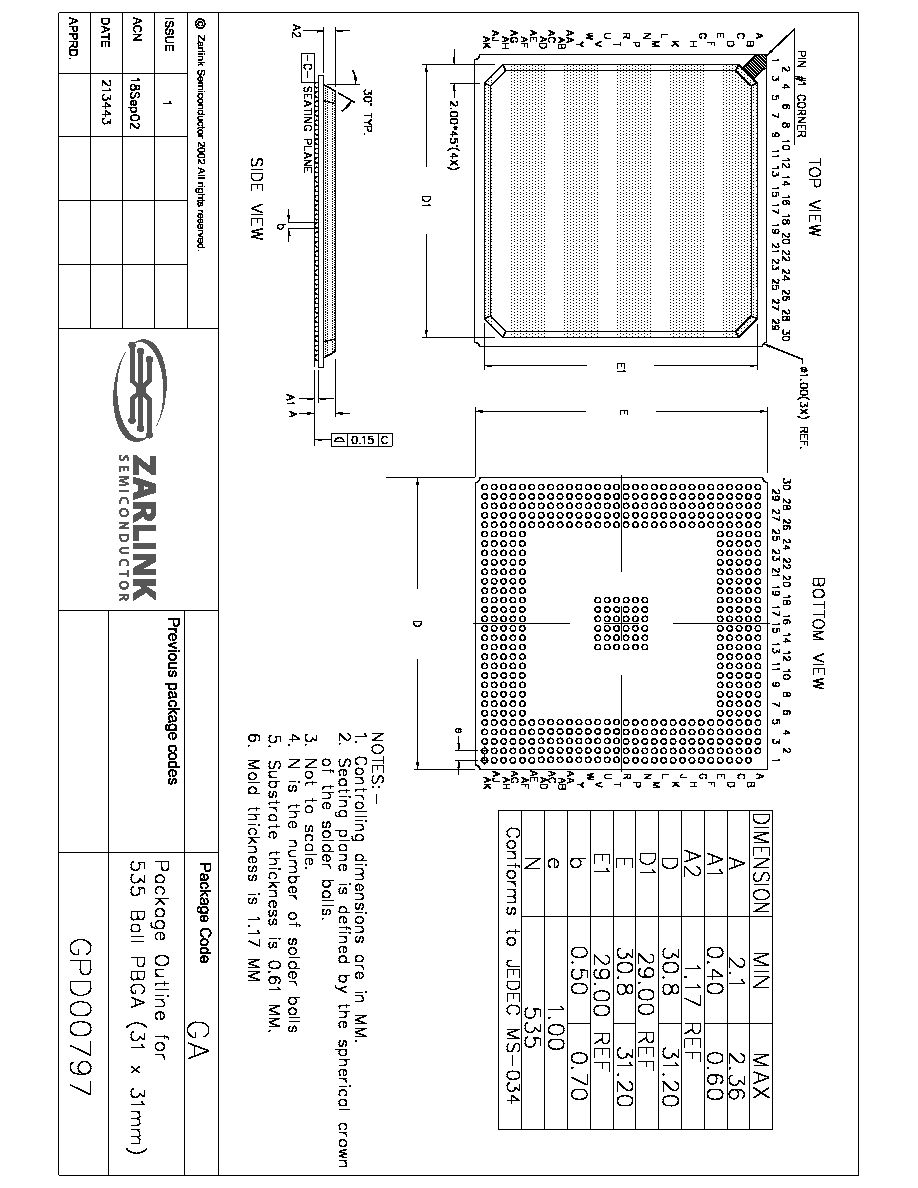
www.zarlink.com
Information relating to products and services furnished herein by Zarlink Semiconductor Inc. trading as Zarlink Semiconductor or its subsidiaries (collectively
"Zarlink") is believed to be reliable. However, Zarlink assumes no liability for errors that may appear in this publication, or for liability otherwise arising from the
application or use of any such information, product or service or for any infringement of patents or other intellectual property rights owned by third parties which may
result from such application or use. Neither the supply of such information or purchase of product or service conveys any license, either express or implied, under
patents or other intellectual property rights owned by Zarlink or licensed from third parties by Zarlink, whatsoever. Purchasers of products are also hereby notified
that the use of product in certain ways or in combination with Zarlink, or non-Zarlink furnished goods or services may infringe patents or other intellectual property
rights owned by Zarlink.
This publication is issued to provide information only and (unless agreed by Zarlink in writing) may not be used, applied or reproduced for any purpose nor form part
of any order or contract nor to be regarded as a representation relating to the products or services concerned. The products, their specifications, services and other
information appearing in this publication are subject to change by Zarlink without notice. No warranty or guarantee express or implied is made regarding the
capability, performance or suitability of any product or service. Information concerning possible methods of use is provided as a guide only and does not constitute
any guarantee that such methods of use will be satisfactory in a specific piece of equipment. It is the user's responsibility to fully determine the performance and
suitability of any equipment using such information and to ensure that any publication or data used is up to date and has not been superseded. Manufacturing does
not necessarily include testing of all functions or parameters. These products are not suitable for use in any medical products whose failure to perform may result in
significant injury or death to the user. All products and materials are sold and services provided subject to Zarlink's conditions of sale which are available on request.
Purchase of Zarlink's I
2
C components conveys a licence under the Philips I
2
C Patent rights to use these components in an I
2
C System, provided that the system
conforms to the I
2
C Standard Specification as defined by Philips.
Zarlink, ZL and the Zarlink Semiconductor logo are trademarks of Zarlink Semiconductor Inc.
Copyright 2003, Zarlink Semiconductor Inc. All Rights Reserved.
TECHNICAL DOCUMENTATION - NOT FOR RESALE
For more information about all Zarlink products
visit our Web Site at